串口通讯实验–通讯的基本概念
通讯的基本概念
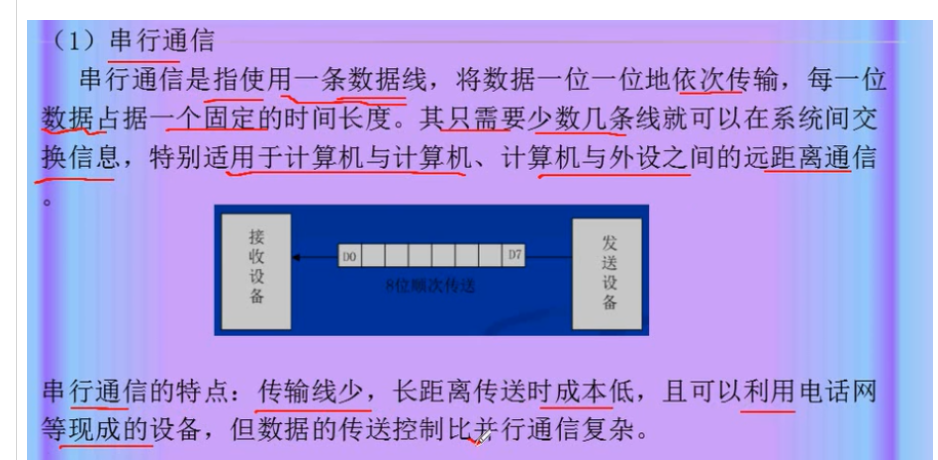
1、串行通讯
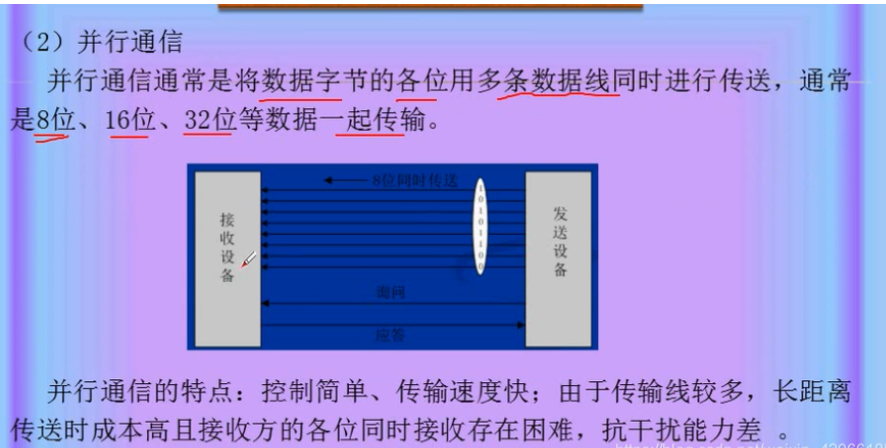
 2、并行通讯
2、并行通讯
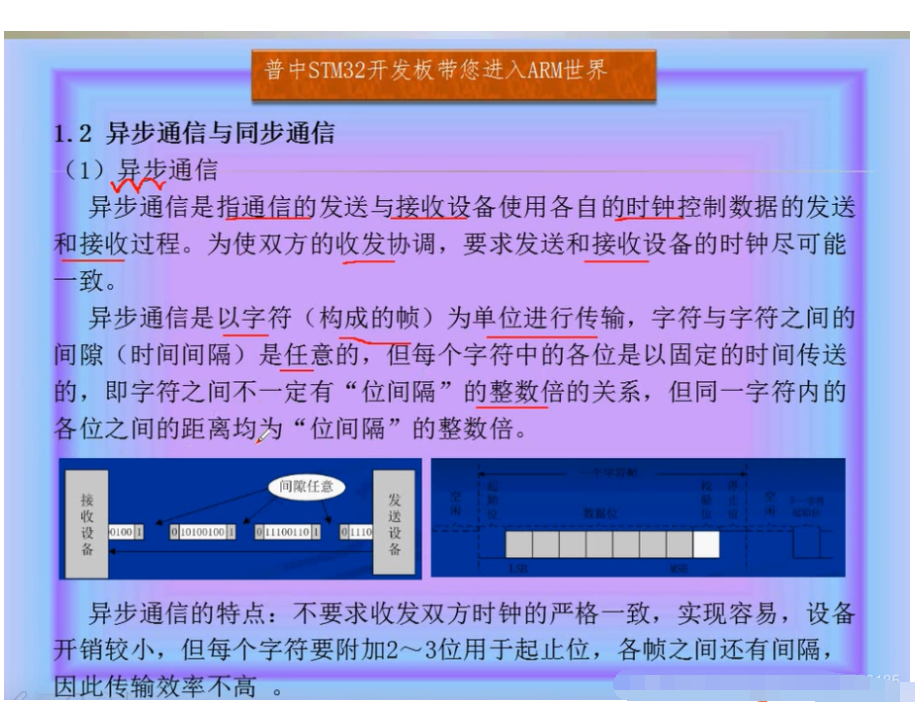
 3、异步通讯
3、异步通讯
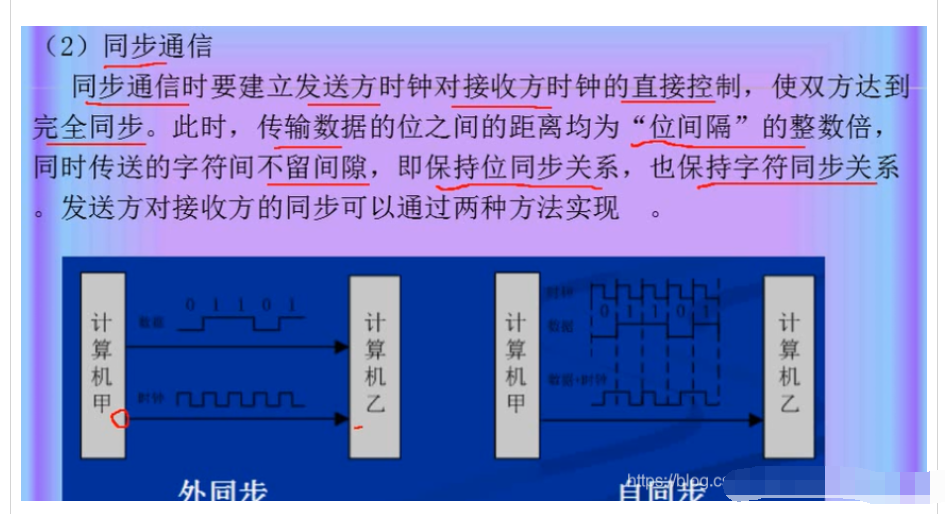
 4、同步通讯
4、同步通讯
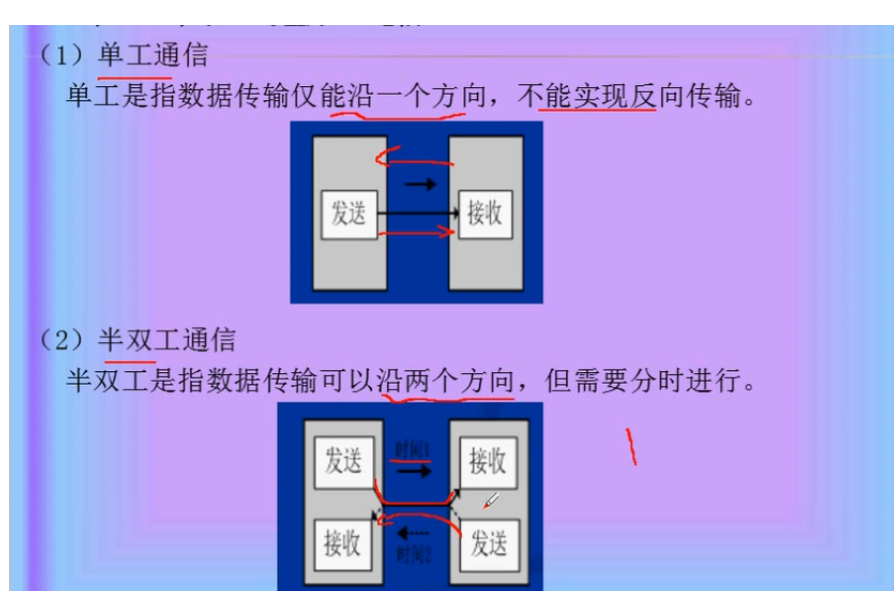
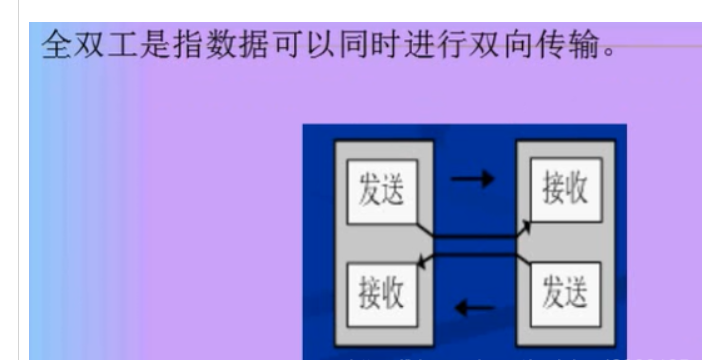
 5、单工、半双工、全双工
5、单工、半双工、全双工
 串口通讯实验–USART介绍
串口通讯简介
一般采用的是标准的电气标准,但是采用的协议没有标准规定,但是,我们一般都采用96N81 的标准(9600波特率, N 无校验位, 8 位数据位,1位停止位)
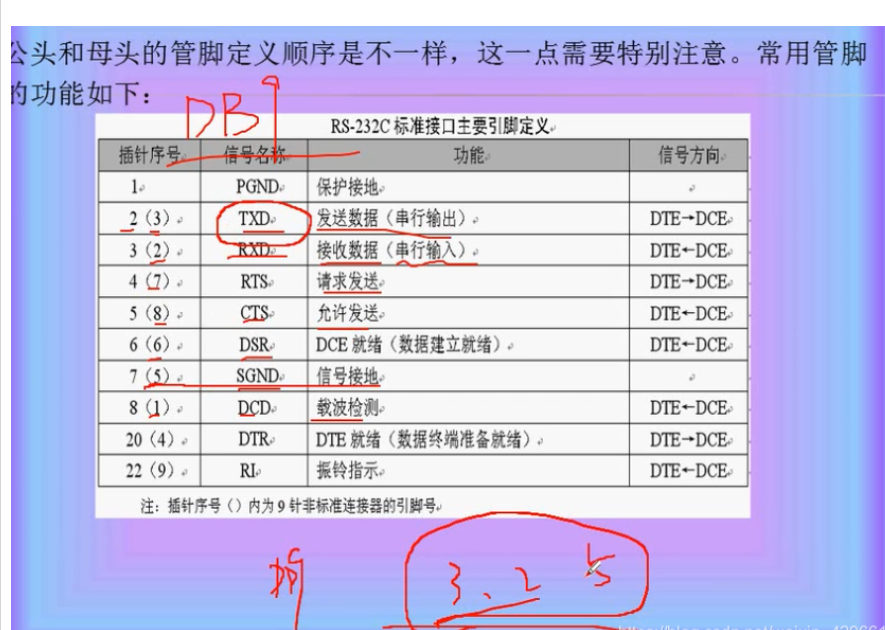
串口通讯一般当采用的引脚只有三个,所以 TXD RXD SGND 这三个
串口通讯实验–USART介绍
串口通讯简介
一般采用的是标准的电气标准,但是采用的协议没有标准规定,但是,我们一般都采用96N81 的标准(9600波特率, N 无校验位, 8 位数据位,1位停止位)
串口通讯一般当采用的引脚只有三个,所以 TXD RXD SGND 这三个
 USART 同步异步收发器
USART 同步异步收发器
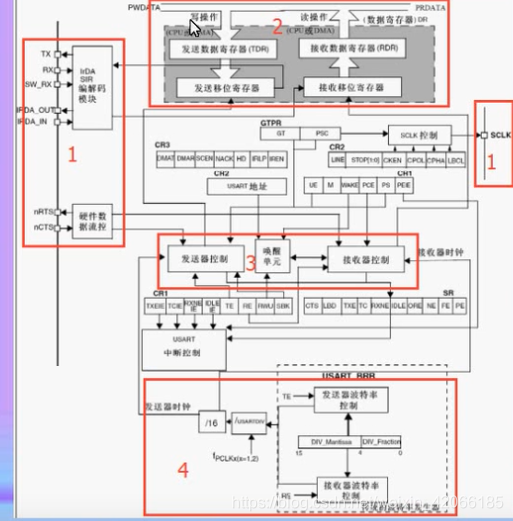
 USART的结构框图
USART的结构框图
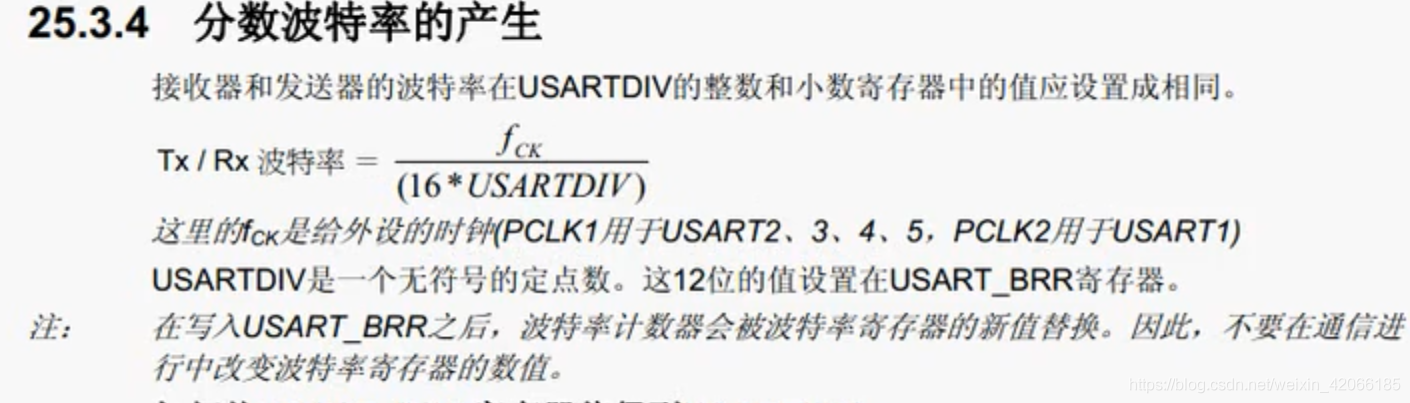
 关于波特率的相关问题
关于波特率的相关问题
 串口通讯实验–USART 的配置步骤
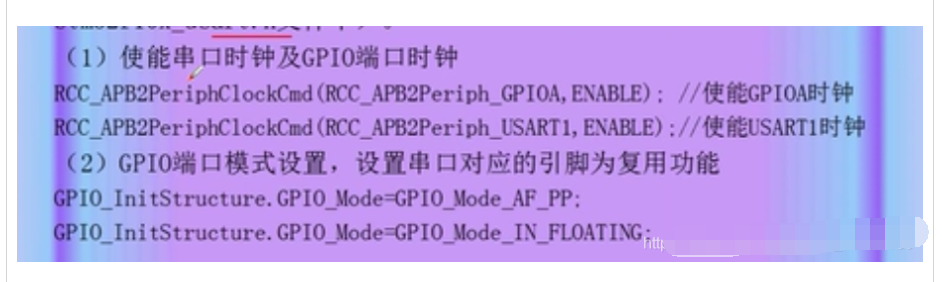
step1 使能串口时钟概念和对应的串口引脚
串口通讯实验–USART 的配置步骤
step1 使能串口时钟概念和对应的串口引脚
 step2 初始化串口参数
step2 初始化串口参数
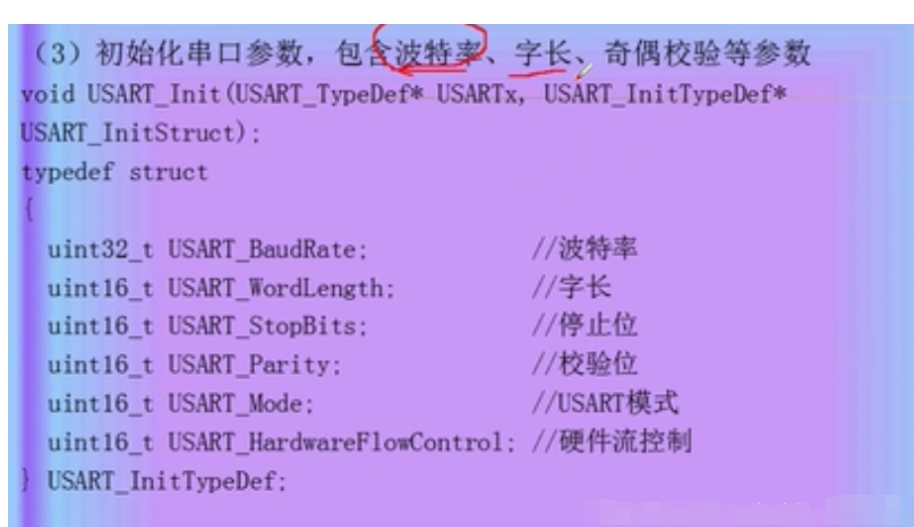 停止位: 可以设置成0.5 1 1.5 2
校验位:无校验 偶校验 灯
硬件流控制:一般不采用硬件流控制
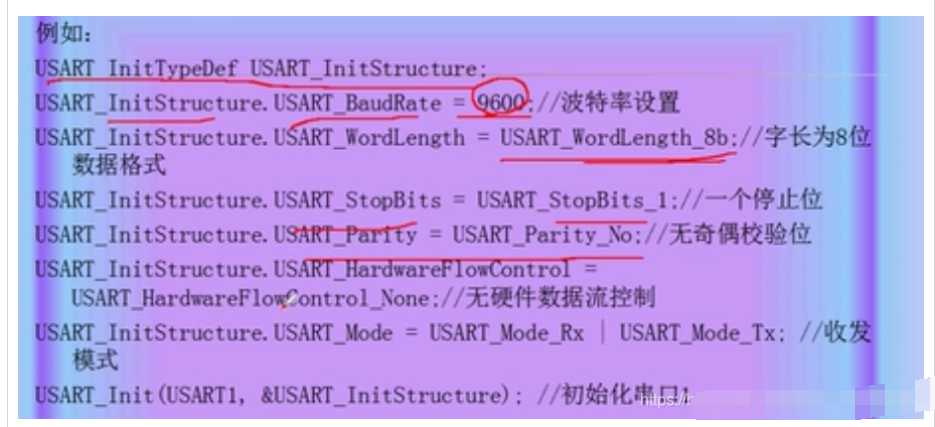
例子:
停止位: 可以设置成0.5 1 1.5 2
校验位:无校验 偶校验 灯
硬件流控制:一般不采用硬件流控制
例子:
 step4 使能串口和设置中断类型
step4 使能串口和设置中断类型
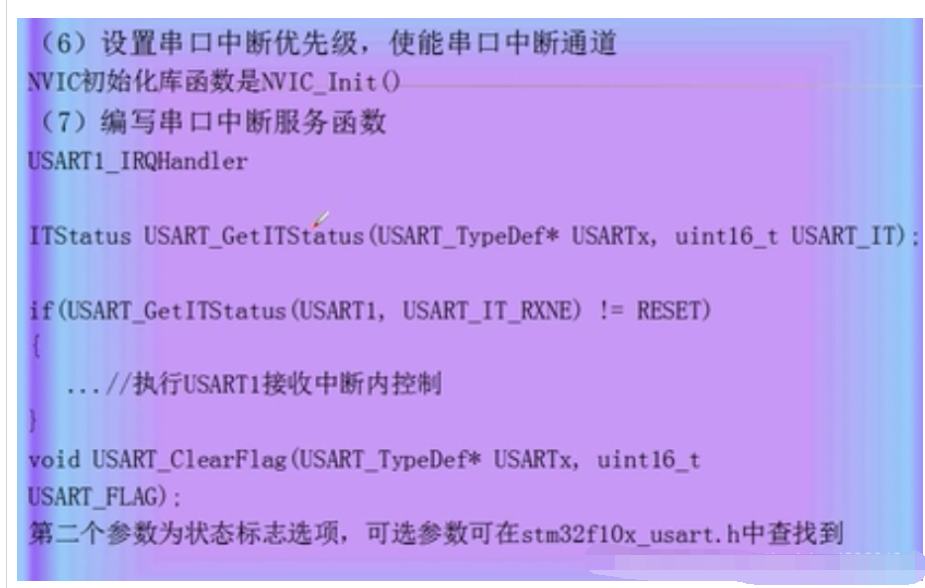
 step5 设置中断优先级,并且编写中断服务函数
step5 设置中断优先级,并且编写中断服务函数
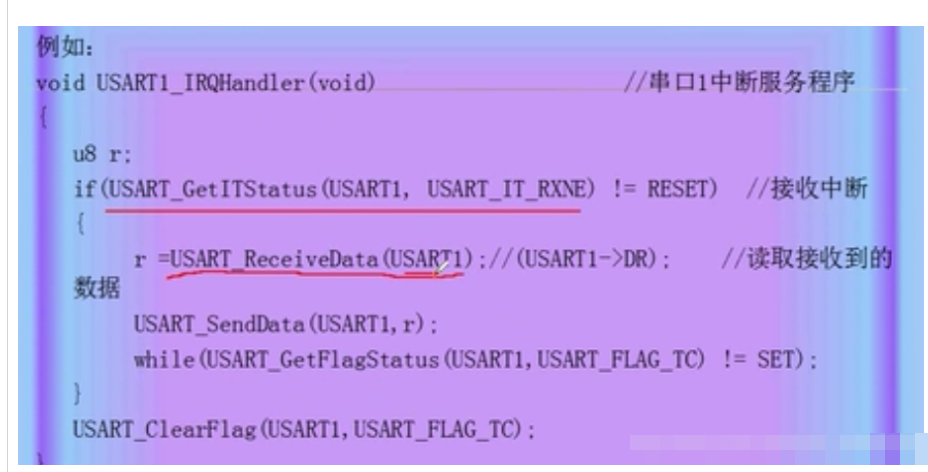
 例子:
例子:
 串口实验的通信控制程序
1、基本过程
串口实验的通信控制程序
1、基本过程
2、编写函数
step1 串口初始化函数
#include "usart.h"
/*******************************************************************************
* º¯ Êý Ãû : usart_init
* º¯Êý¹¦ÄÜ : ´®¿Ú³õʼ»¯º¯Êý
* Êä Èë : ÎÞ
* Êä ³ö : ÎÞ
*******************************************************************************/
void usart_init()
{
GPIO_InitTypeDef GPIO_InitStructure; //ÉùÃ÷Ò»¸ö½á¹¹Ìå±äÁ¿£¬ÓÃÀ´³õʼ»¯GPIO
USART_InitTypeDef USART_InitStructure; //´®¿Ú½á¹¹Ì嶨Òå
NVIC_InitTypeDef NVIC_InitStructure;//ÖжϽ设置中断优先级
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); // ʹÄܶ˿ÚʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //ʹÄÜ´®¿ÚʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //´ò¿ªÊ±ÖÓ
/* ÅäÖÃGPIOµÄģʽºÍIO¿Ú */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //´®¿ÚÊä³öPA9
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA,&GPIO_InitStructure); /* ³õʼ»¯´®¿ÚÊäÈëIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //´®¿ÚÊäÈëPA10
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //Ä£ÄâÊäÈë
GPIO_Init(GPIOA,&GPIO_InitStructure); /* ³õʼ»¯GPIO */
USART_InitStructure.USART_BaudRate=9600; //²¨ÌØÂÊÉèÖÃΪ9600 //²¨ÌØÂÊ 波特率
USART_InitStructure.USART_WordLength=USART_WordLength_8b; //Êý¾Ý³¤8λ 数据长度
USART_InitStructure.USART_StopBits=USART_StopBits_1; //1λֹͣλ 停止位
USART_InitStructure.USART_Parity=USART_Parity_No; //ÎÞЧÑé 校验位
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //硬件流控制
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx; // 发送模式和接收模式都要打开
USART_Init(USART1,&USART_InitStructure); //串口1 的初始化
USART_Cmd(USART1, ENABLE); /* 使能USART1 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//Ê接收中断Ï
USART_ClearFlag(USART1,USART_FLAG_TC);//清楚发送完成标志位
/* ÉèÖÃNVIC²ÎÊý */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //´ò¿ªUSART1µÄÈ«¾ÖÖжÏ
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //ÇÀÕ¼ÓÅÏȼ¶Îª0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //ÏìÓ¦ÓÅÏȼ¶Îª0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //ʹÄÜ
NVIC_Init(&NVIC_InitStructure);
}
串口通讯实验–通讯的基本概念
通讯的基本概念
1、串行通讯
2、并行通讯
3、异步通讯
4、同步通讯
5、单工、半双工、全双工
串口通讯实验–USART介绍
串口通讯简介
一般采用的是标准的电气标准,但是采用的协议没有标准规定,但是,我们一般都采用96N81 的标准(9600波特率, N 无校验位, 8 位数据位,1位停止位)
串口通讯一般当采用的引脚只有三个,所以 TXD RXD SGND 这三个
USART 同步异步收发器
USART的结构框图
关于波特率的相关问题
串口通讯实验–USART 的配置步骤
step1 使能串口时钟概念和对应的串口引脚
step2 初始化串口参数
停止位: 可以设置成0.5 1 1.5 2
校验位:无校验 偶校验 灯
硬件流控制:一般不采用硬件流控制
例子:
step4 使能串口和设置中断类型
step5 设置中断优先级,并且编写中断服务函数
例子:
串口实验的通信控制程序
1、基本过程
2、编写函数
step1 串口初始化函数
#include "usart.h"
/*******************************************************************************
* º¯ Êý Ãû : usart_init
* º¯Êý¹¦ÄÜ : ´®¿Ú³õʼ»¯º¯Êý
* Êä Èë : ÎÞ
* Êä ³ö : ÎÞ
*******************************************************************************/
void usart_init()
{
GPIO_InitTypeDef GPIO_InitStructure; //ÉùÃ÷Ò»¸ö½á¹¹Ìå±äÁ¿£¬ÓÃÀ´³õʼ»¯GPIO
USART_InitTypeDef USART_InitStructure; //´®¿Ú½á¹¹Ì嶨Òå
NVIC_InitTypeDef NVIC_InitStructure;//ÖжϽ设置中断优先级
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); // ʹÄܶ˿ÚʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //ʹÄÜ´®¿ÚʱÖÓ
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //´ò¿ªÊ±ÖÓ
/* ÅäÖÃGPIOµÄģʽºÍIO¿Ú */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX //´®¿ÚÊä³öPA9
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA,&GPIO_InitStructure); /* ³õʼ»¯´®¿ÚÊäÈëIO */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;//RX //´®¿ÚÊäÈëPA10
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING; //Ä£ÄâÊäÈë
GPIO_Init(GPIOA,&GPIO_InitStructure); /* ³õʼ»¯GPIO */
USART_InitStructure.USART_BaudRate=9600; //²¨ÌØÂÊÉèÖÃΪ9600 //²¨ÌØÂÊ 波特率
USART_InitStructure.USART_WordLength=USART_WordLength_8b; //Êý¾Ý³¤8λ 数据长度
USART_InitStructure.USART_StopBits=USART_StopBits_1; //1λֹͣλ 停止位
USART_InitStructure.USART_Parity=USART_Parity_No; //ÎÞЧÑé 校验位
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //硬件流控制
USART_InitStructure.USART_Mode=USART_Mode_Rx|USART_Mode_Tx; // 发送模式和接收模式都要打开
USART_Init(USART1,&USART_InitStructure); //串口1 的初始化
USART_Cmd(USART1, ENABLE); /* 使能USART1 */
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//Ê接收中断Ï
USART_ClearFlag(USART1,USART_FLAG_TC);//清楚发送完成标志位
/* ÉèÖÃNVIC²ÎÊý */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //´ò¿ªUSART1µÄÈ«¾ÖÖжÏ
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //ÇÀÕ¼ÓÅÏȼ¶Îª0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //ÏìÓ¦ÓÅÏȼ¶Îª0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //ʹÄÜ
NVIC_Init(&NVIC_InitStructure);
}

 举报
举报





















 举报
举报



