串口通信
从物理层和协议层将起。
物理层
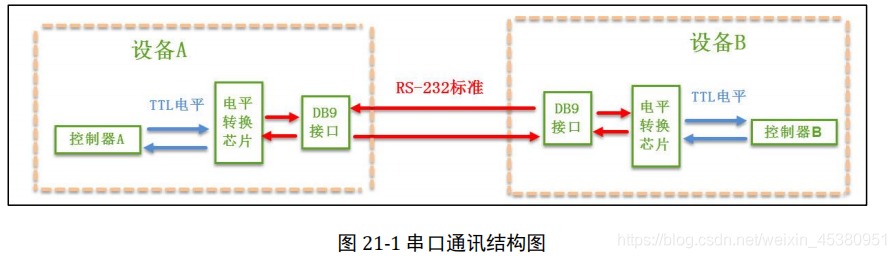 由于 RS-232 电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL 标准”的电平信号,才能实现通讯。
协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据
由于 RS-232 电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL 标准”的电平信号,才能实现通讯。
协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据
STM32的USART
通用同步异步收发器是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换,是在 USART 基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。USART 就是对这些传输参数有具体规定,当然也不是只有唯一一个参数值,很多参数值都可以自定义设置,只是增强它的兼容性。
多说不如写代码:
usart.h
#ifndef _USART_H
#define _USART_H
#include "stm32f10x.h"
void init_usart_123(void);
#endif
usart.c
#include "stm32f10x.h"
#include "usart.h"
#include "stdio.h"
//初始化gpio
void init_usart_gpio(void){
GPIO_InitTypeDef pa9;
GPIO_InitTypeDef pa10;
//第一步,启用GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//第二步,GPIO初始化
// 2.1 txd
pa9.GPIO_Mode = GPIO_Mode_AF_PP;
pa9.GPIO_Pin = GPIO_Pin_9;
pa9.GPIO_Speed = GPIO_Speed_50MHz;
// 2.2 rxd
pa10.GPIO_Mode = GPIO_Mode_IN_FLOATING;
pa10.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA, &pa9);
GPIO_Init(GPIOA, &pa10);
}
//初始化串口配置
void init_usart(void){
USART_InitTypeDef usart;
//第一步,打开串口外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//第二步,设置串口的工作参数,波特率,数据格式
usart.USART_BaudRate=115200;
usart.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
usart.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;
usart.USART_Parity=USART_Parity_No;
usart.USART_StopBits=USART_StopBits_1;
usart.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&usart);
//第三步,启用串口
USART_Cmd(USART1,ENABLE);
}
//初始化串口中断
void init_usart_it(void){
// 启用串口
USART_Cmd(USART1, ENABLE);
// 接收到数据,产生中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
//初始化总中断
static void init_usart_nvic(void){
NVIC_InitTypeDef nvic;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 串口1中断源
nvic.NVIC_IRQChannel = USART1_IRQn;
nvic.NVIC_IRQChannelPreemptionPriority = 1;
nvic.NVIC_IRQChannelSubPriority = 1;
nvic.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvic);
}
//发送一个字节
void usart_sendbyte(USART_TypeDef * pUSARTx, uint8_t ch)
{
//第一步,发送一个字节
USART_SendData(USART1, ch);
// 第二步,等待发送完成
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {
}
}
void usart_sendstring(USART_TypeDef * pUSARTx, char *data)
{
// 发送每个字符,不包括结束符'�'
while(*data != '�') {
usart_sendbyte(pUSARTx, *data);
data++;
}
}
//实现fputc
int fputc(int ch,FILE *f){
usart_sendbyte(USART1, ch);
return ch;
}
//#pragma import(__use_no_semihosting)
struct __FILE
{
int a;
};
FILE __stdout;
//禁用半主机模式
void disable_semihosting(void){
}
//使用MicroLib
void use_microlib(void){
}
void init_usart_123(void){
init_usart_gpio();
init_usart();
init_usart_nvic();
init_usart_it();
}
main.c
#include "stm32f10x.h"
#include "stdio.h"
#include "usart.h"
void delay()
{
int i;
int j;
for (i = 100; i > 0; i--)
{
for (j = 100; j > 0; j--)
{
}
}
}
int main()
{
init_usart_123();
while(1) {
delay();
printf("hello world!n");
}
}
编译成功之后,烧写程序,借用stc查看接收到的消息。
串口通信
从物理层和协议层将起。
物理层
由于 RS-232 电平标准的信号不能直接被控制器直接识别,所以这些信号会经过一个“电平转换芯片”转换成控制器能识别的“TTL 标准”的电平信号,才能实现通讯。
协议层
串口通讯的数据包由发送设备通过自身的 TXD 接口传输到接收设备的 RXD 接口。在串口通讯的协议层中,规定了数据包的内容,它由启始位、主体数据、校验位以及停止位组成,通讯双方的数据包格式要约定一致才能正常收发数据
STM32的USART
通用同步异步收发器是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换,是在 USART 基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。
串行通信一般是以帧格式传输数据,即是一帧一帧的传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。USART 就是对这些传输参数有具体规定,当然也不是只有唯一一个参数值,很多参数值都可以自定义设置,只是增强它的兼容性。
多说不如写代码:
usart.h
#ifndef _USART_H
#define _USART_H
#include "stm32f10x.h"
void init_usart_123(void);
#endif
usart.c
#include "stm32f10x.h"
#include "usart.h"
#include "stdio.h"
//初始化gpio
void init_usart_gpio(void){
GPIO_InitTypeDef pa9;
GPIO_InitTypeDef pa10;
//第一步,启用GPIO时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
//第二步,GPIO初始化
// 2.1 txd
pa9.GPIO_Mode = GPIO_Mode_AF_PP;
pa9.GPIO_Pin = GPIO_Pin_9;
pa9.GPIO_Speed = GPIO_Speed_50MHz;
// 2.2 rxd
pa10.GPIO_Mode = GPIO_Mode_IN_FLOATING;
pa10.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA, &pa9);
GPIO_Init(GPIOA, &pa10);
}
//初始化串口配置
void init_usart(void){
USART_InitTypeDef usart;
//第一步,打开串口外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//第二步,设置串口的工作参数,波特率,数据格式
usart.USART_BaudRate=115200;
usart.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
usart.USART_Mode=USART_Mode_Rx | USART_Mode_Tx;
usart.USART_Parity=USART_Parity_No;
usart.USART_StopBits=USART_StopBits_1;
usart.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&usart);
//第三步,启用串口
USART_Cmd(USART1,ENABLE);
}
//初始化串口中断
void init_usart_it(void){
// 启用串口
USART_Cmd(USART1, ENABLE);
// 接收到数据,产生中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}
//初始化总中断
static void init_usart_nvic(void){
NVIC_InitTypeDef nvic;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
// 串口1中断源
nvic.NVIC_IRQChannel = USART1_IRQn;
nvic.NVIC_IRQChannelPreemptionPriority = 1;
nvic.NVIC_IRQChannelSubPriority = 1;
nvic.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvic);
}
//发送一个字节
void usart_sendbyte(USART_TypeDef * pUSARTx, uint8_t ch)
{
//第一步,发送一个字节
USART_SendData(USART1, ch);
// 第二步,等待发送完成
while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET) {
}
}
void usart_sendstring(USART_TypeDef * pUSARTx, char *data)
{
// 发送每个字符,不包括结束符'�'
while(*data != '�') {
usart_sendbyte(pUSARTx, *data);
data++;
}
}
//实现fputc
int fputc(int ch,FILE *f){
usart_sendbyte(USART1, ch);
return ch;
}
//#pragma import(__use_no_semihosting)
struct __FILE
{
int a;
};
FILE __stdout;
//禁用半主机模式
void disable_semihosting(void){
}
//使用MicroLib
void use_microlib(void){
}
void init_usart_123(void){
init_usart_gpio();
init_usart();
init_usart_nvic();
init_usart_it();
}
main.c
#include "stm32f10x.h"
#include "stdio.h"
#include "usart.h"
void delay()
{
int i;
int j;
for (i = 100; i > 0; i--)
{
for (j = 100; j > 0; j--)
{
}
}
}
int main()
{
init_usart_123();
while(1) {
delay();
printf("hello world!n");
}
}
编译成功之后,烧写程序,借用stc查看接收到的消息。

 举报
举报




 举报
举报



