1.位置信息
无刷电机的控制不可脱离转子的位置信息。知道转子的位置反馈是对无刷电机控制的前提。通常分为有感和无感。
有感:即为有位置传感器,像霍尔、光电增量式编码器、旋转变压器、磁编等等。
无感:则是电机不需要位置传感器,通过电机自身的信息计算或则估计转子的位置。
2.无感的方法
基于模型法的位置/转速观测器有三部分,反电动势、磁链信息观测、位置误差信号解耦位置/转速观测。反电动势或磁链信息观测方法的不同,模型有自适应法、扩展卡尔曼滤波器法、磁链观测法、状态观测法、滑膜观测法。
反电动势过零检测法应用广泛,实现简单、技术成熟。
3.反电动势过零检测
3.1 反电动势过零检测法基本原理:
忽略电动机电枢反应,无刷直流电动机在稳态运行过程中,通过检测关断相的反电动势过零点获得转子的位置信号,进行对逆变器开关导通顺序切换,控制电机运动。
3.2 缺点:
电机静止和低速时,反电动势很小或者为0,无法获取转子位置信号,电机低速时性能较差,启动时需要开环启动。
3.3 硬件电路

反电动势图:

正向反电动势过零点变化:
[tr]反电动势零点变化趋势[/tr]C-C相反电动势又正到负

3.4 电路计算:

可以直接得到电机端的电压方程:

假设c相不导通时有:

可以得到反电动势:

同理可以得到A、B相的的反电动势

通过这三个方差去判断反电动势的正负变化得到零点。但是还可以优化一下,方便编程。
①和②重新组合一下合一得到:

当Ec=0时候满足:

可以得到:

4.TI程序:
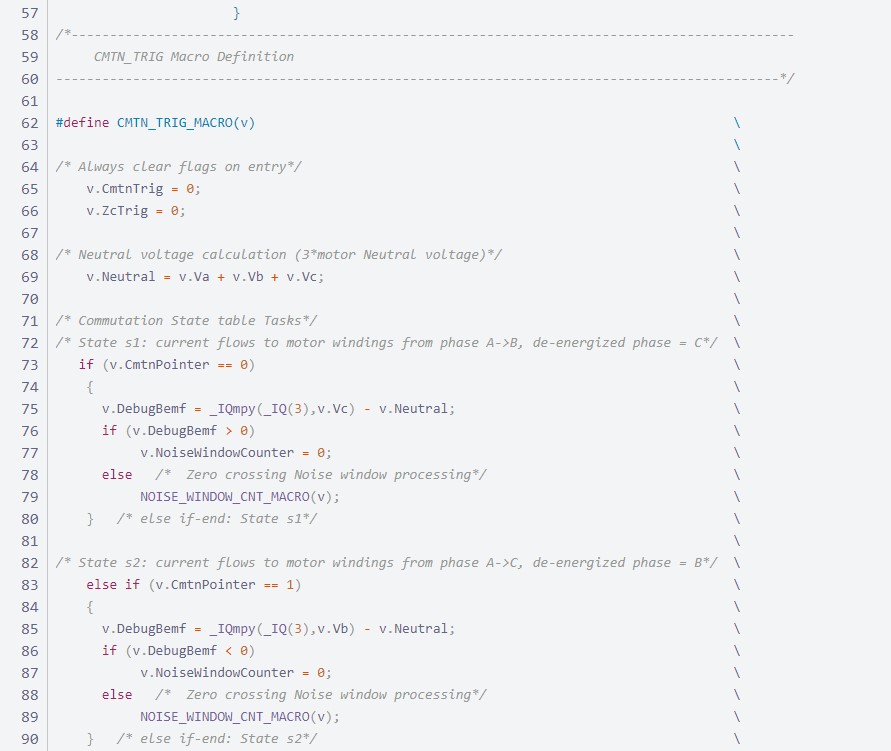
4.1 换向点电气行为
**因为在在相位换向的瞬间,由于直流电平或电源板的寄生电感和电容,可能会出现高dV /dt和dI/dt毛刺。可能会对计算的中性点电压有错误。**通过丢弃前几次扫描来克服这问题。(比如从负到正,先一直为负,检测到4次为正时,标志到了过零点检测,算是滤波)
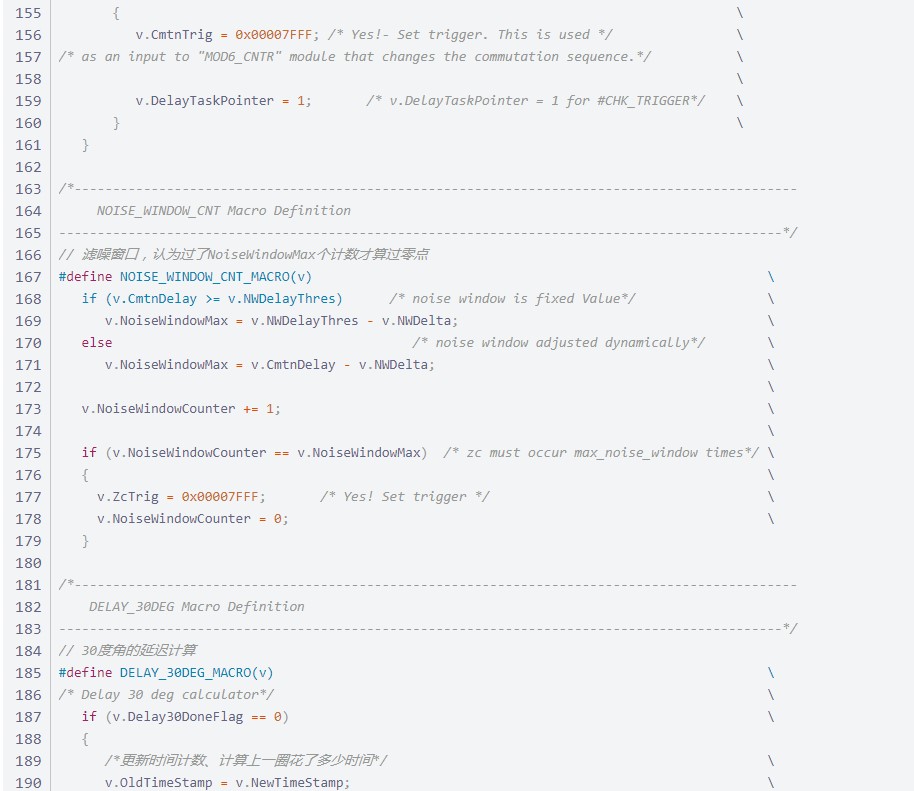
在代码中,这是通过名为“NOISE_WIN”的功能实现的。持续时间取决于电源开关,电源板设计,相电感和驱动的直流电。此参数取决于系统,并且在电动机的低速范围内设置为较大的值。随着速度的增加,由于Bemf零交叉点也以更高的速度变得越来越近,所以逐渐降低了该持续时间。
4.2 换向30度延迟
在有效的传感控制中,Bemf的零交叉点从相位换向时刻偏移了30º。因此,在借助六个过零事件来运行无传感器BLDC电动机之前,有必要计算与该30º延迟角相对应的时间延迟获得精确的换向点。这是通过实现位置插值功能来实现的。
相应的时间延迟以采样时间段的数量表示,并存储在变量CmtnDelay中。
Time delay = CmtnDelay .Ts = T(a/360) = VirtualTimer.Ts(a/360) = VirtualTimer 。 Ts/12
其中,Ts是采样时间段,VirtualTimer是计时器,用于对转子上一圈旋转期间的采样周期数进行计数。
4.3TI代码实现





1.位置信息
无刷电机的控制不可脱离转子的位置信息。知道转子的位置反馈是对无刷电机控制的前提。通常分为有感和无感。
有感:即为有位置传感器,像霍尔、光电增量式编码器、旋转变压器、磁编等等。
无感:则是电机不需要位置传感器,通过电机自身的信息计算或则估计转子的位置。
2.无感的方法
基于模型法的位置/转速观测器有三部分,反电动势、磁链信息观测、位置误差信号解耦位置/转速观测。反电动势或磁链信息观测方法的不同,模型有自适应法、扩展卡尔曼滤波器法、磁链观测法、状态观测法、滑膜观测法。
反电动势过零检测法应用广泛,实现简单、技术成熟。
3.反电动势过零检测
3.1 反电动势过零检测法基本原理:
忽略电动机电枢反应,无刷直流电动机在稳态运行过程中,通过检测关断相的反电动势过零点获得转子的位置信号,进行对逆变器开关导通顺序切换,控制电机运动。
3.2 缺点:
电机静止和低速时,反电动势很小或者为0,无法获取转子位置信号,电机低速时性能较差,启动时需要开环启动。
3.3 硬件电路
反电动势图:
正向反电动势过零点变化:
[tr]反电动势零点变化趋势[/tr]C-C相反电动势又正到负
3.4 电路计算:
可以直接得到电机端的电压方程:
假设c相不导通时有:
可以得到反电动势:
同理可以得到A、B相的的反电动势
通过这三个方差去判断反电动势的正负变化得到零点。但是还可以优化一下,方便编程。
①和②重新组合一下合一得到:
当Ec=0时候满足:
可以得到:
4.TI程序:
4.1 换向点电气行为
**因为在在相位换向的瞬间,由于直流电平或电源板的寄生电感和电容,可能会出现高dV /dt和dI/dt毛刺。可能会对计算的中性点电压有错误。**通过丢弃前几次扫描来克服这问题。(比如从负到正,先一直为负,检测到4次为正时,标志到了过零点检测,算是滤波)
在代码中,这是通过名为“NOISE_WIN”的功能实现的。持续时间取决于电源开关,电源板设计,相电感和驱动的直流电。此参数取决于系统,并且在电动机的低速范围内设置为较大的值。随着速度的增加,由于Bemf零交叉点也以更高的速度变得越来越近,所以逐渐降低了该持续时间。
4.2 换向30度延迟
在有效的传感控制中,Bemf的零交叉点从相位换向时刻偏移了30º。因此,在借助六个过零事件来运行无传感器BLDC电动机之前,有必要计算与该30º延迟角相对应的时间延迟获得精确的换向点。这是通过实现位置插值功能来实现的。
相应的时间延迟以采样时间段的数量表示,并存储在变量CmtnDelay中。
Time delay = CmtnDelay .Ts = T(a/360) = VirtualTimer.Ts(a/360) = VirtualTimer 。 Ts/12
其中,Ts是采样时间段,VirtualTimer是计时器,用于对转子上一圈旋转期间的采样周期数进行计数。
4.3TI代码实现

 举报
举报



















 举报
举报



