STM32F429移植FreeRTOS
一、环境
Win10、Keil uVision5、STM32CubeMX、STM32F429IGT6
二、准备工作
2.1创建基于HAL库的STM32F429基础工程
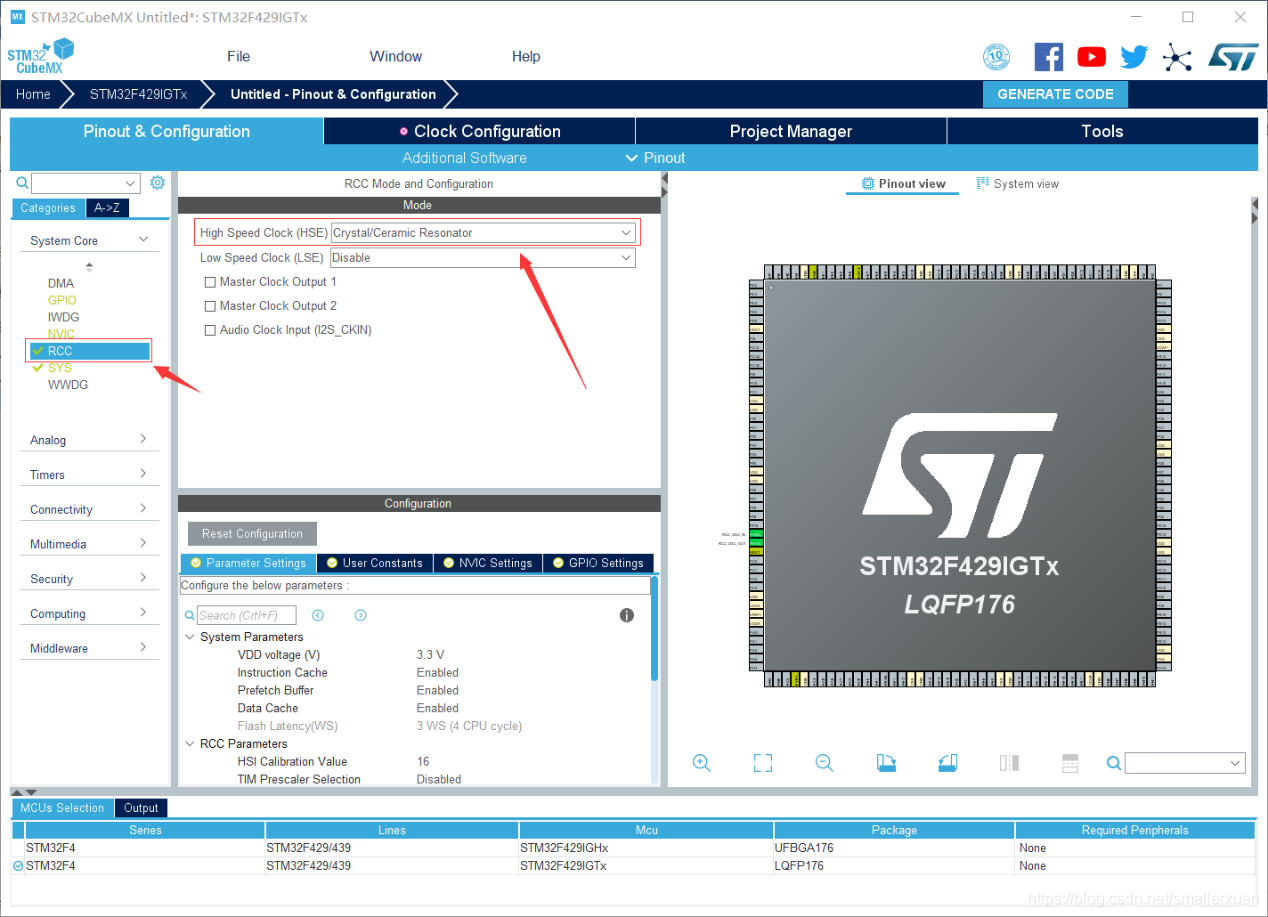
创建新项目,MCU型号选择STM32F429IGTx,然后开始项目。

选择使用外部高速时钟,时钟源为外部晶振,然后配置系统时钟,根据晶振频率将系统时钟配置到180MHz。

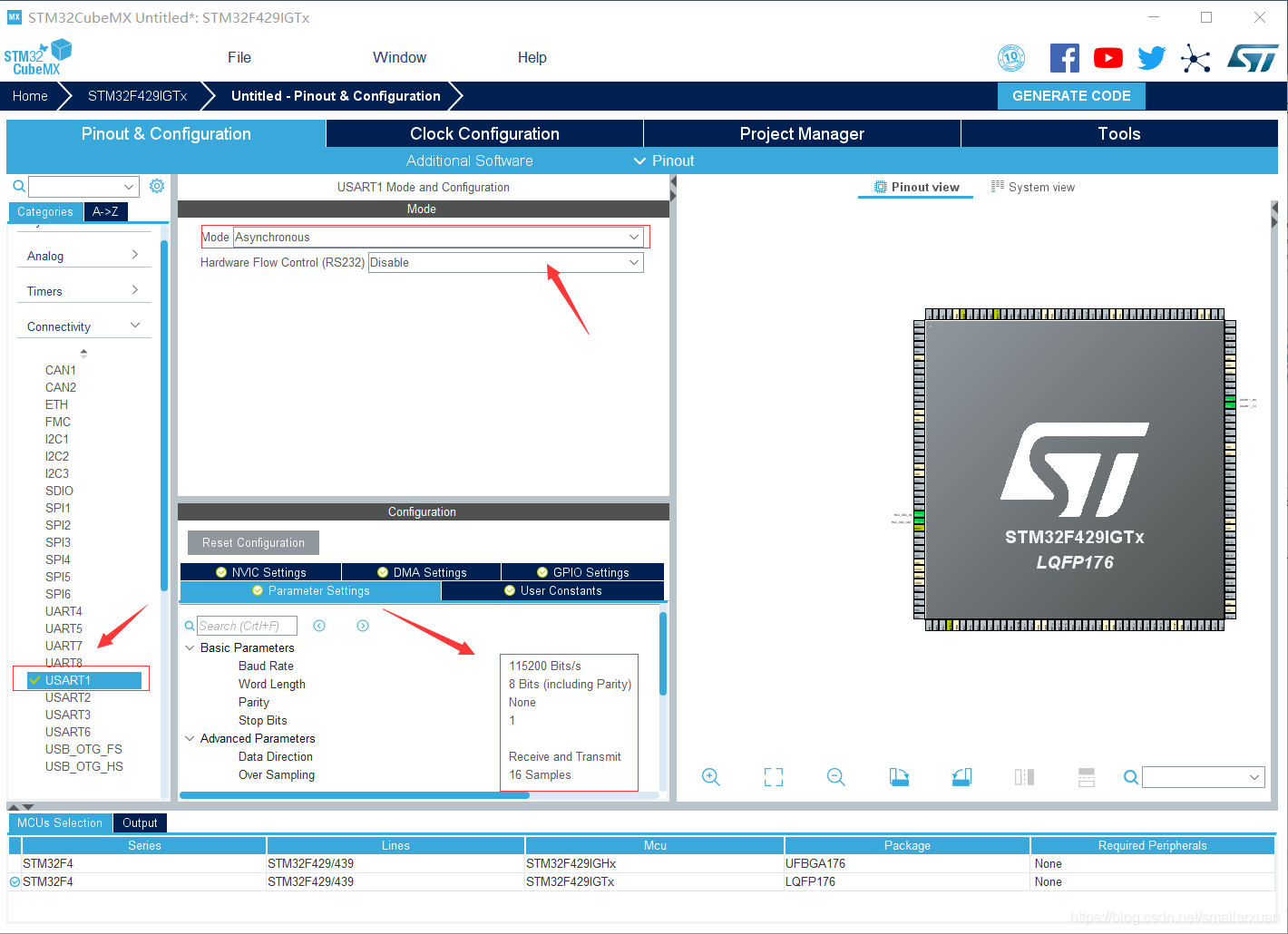
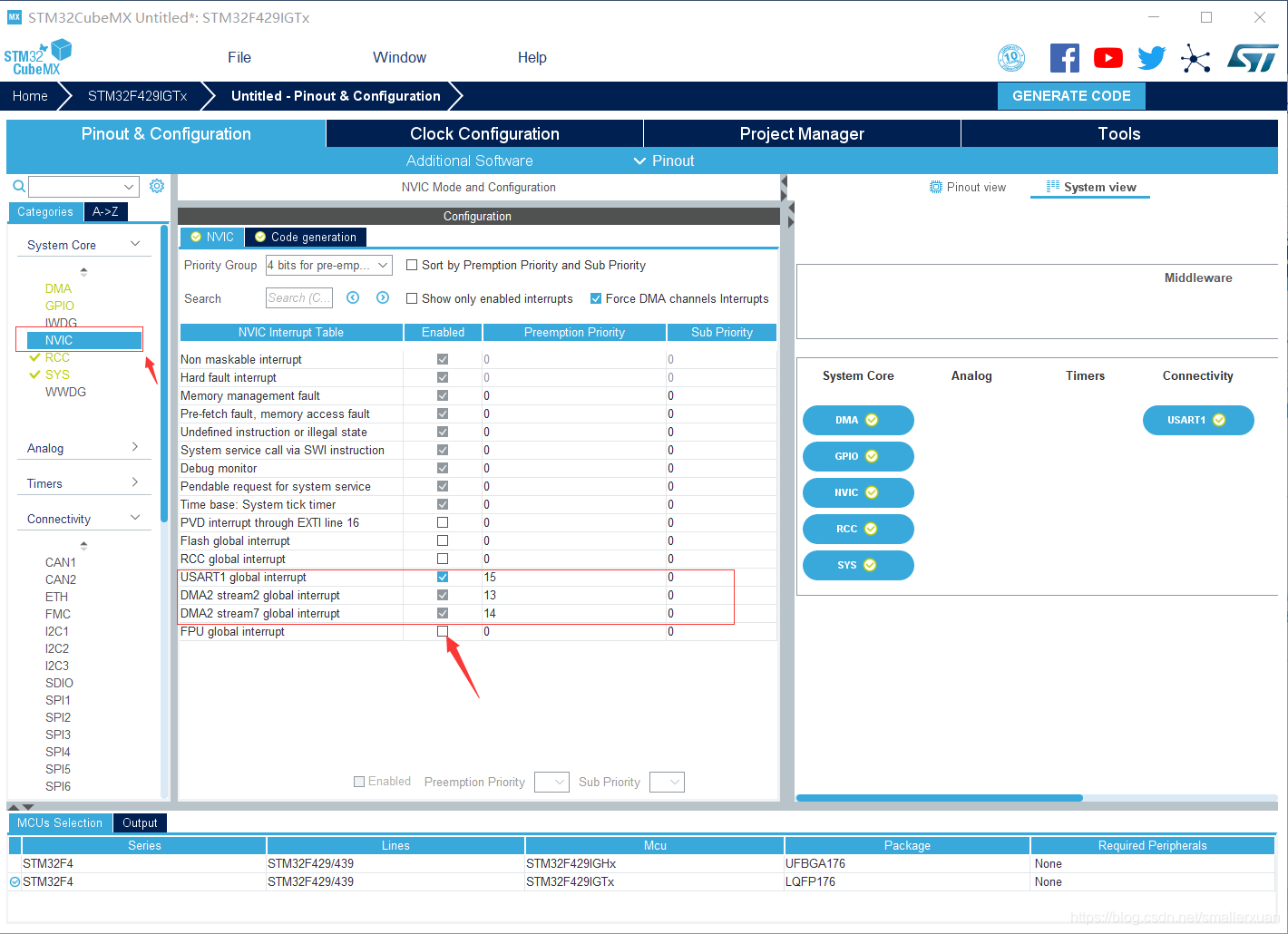
配置USART1为异步收发串口模式,设定为115200波特率,8位数据位,1位停止位,无奇偶校验,配置USART1相关外设IO引脚,启用USART1 DMA收发传输,启用USART1中断和其DMA收发关联通道中断并设定优先级。



在项目管理子页面对项目相关配置项以及代码生成项进行相关配置。

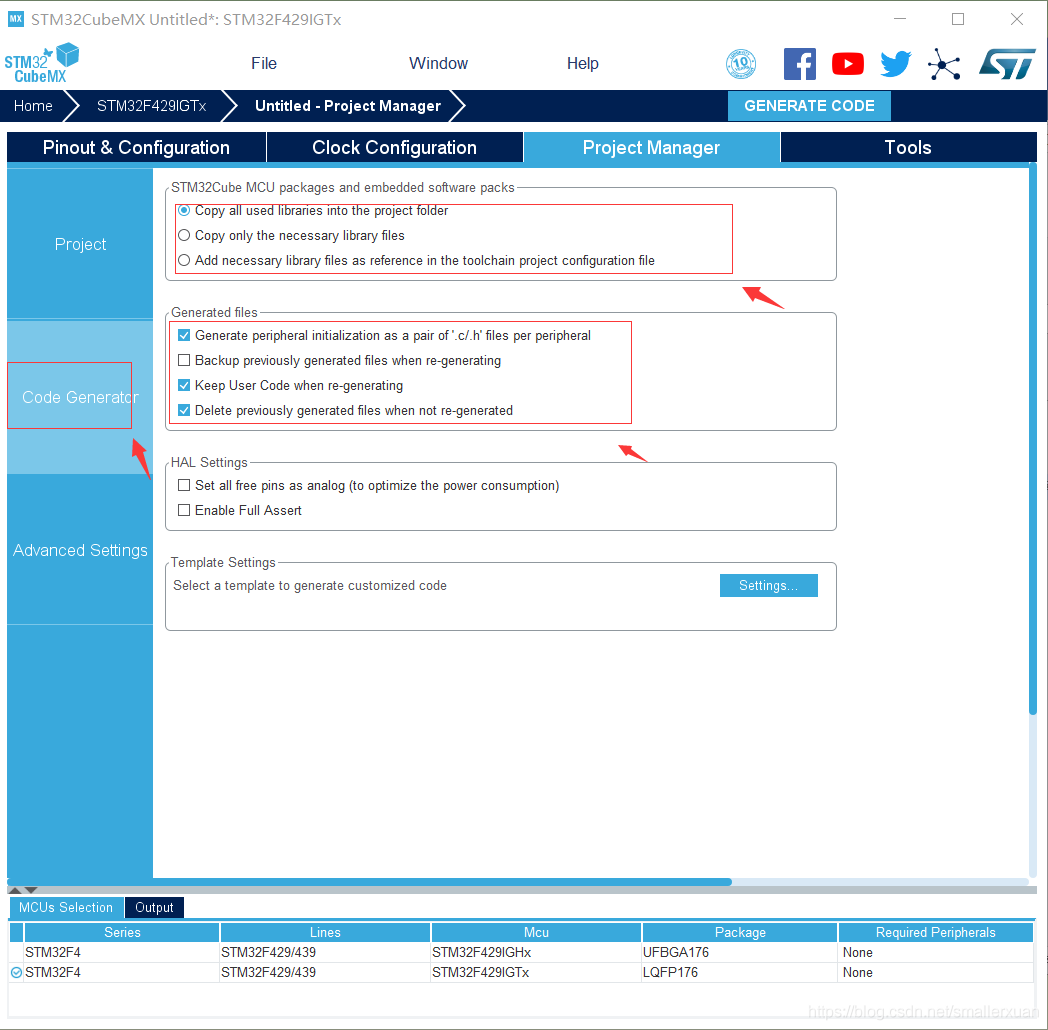
建议对HAL时基源选择为SysTick以外的时钟源。
以上步骤完成后点击生成代码,代码生成完以后用Keil uVision5打开项目并进行编译,此时编译应该是能正常编译的。
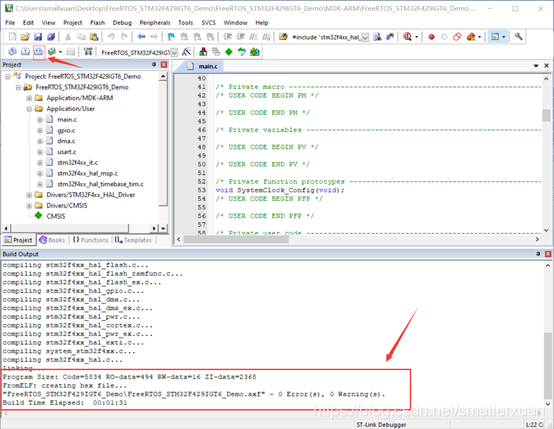
经过以上步骤,我们创建了不含有FreeRTOS的基础工程(如果想使用CMSIS接口的也可以在配置时直接勾选使用FreeRTOS中间件)。
2.2获取FreeRTOS源码
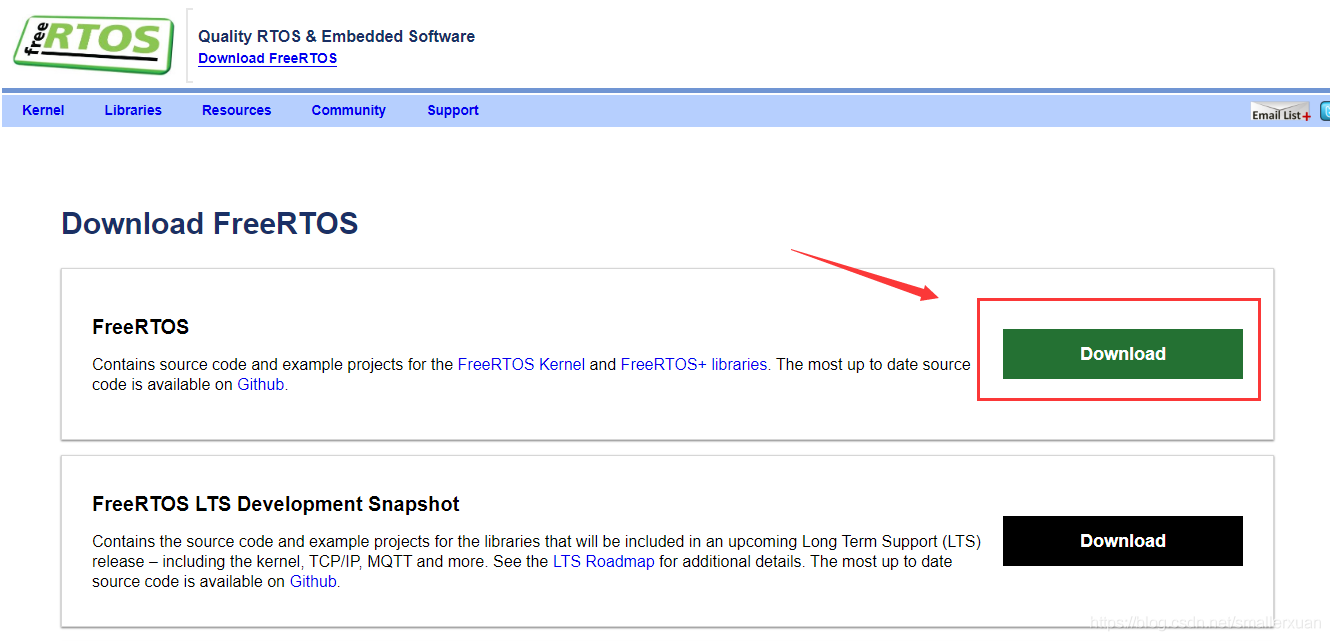
FreeRTOS作为开源RTOS,允许开源商用,可以在其官方网站找到源码获取入口(官方网址为:www.freertos.org)。进入官网后,在首页点击下载FreeRTOS,进入下载页面点击下载。这里我获取的是FreeRTOS V10.3.1的源码。
三、FreeRTOS移植
在STM32CubeMX生成的项目目录中添加子目录FreeRTOS。将官方源码中Source目录中的所有内容全部复制到我们创建的FreeRTOS目录下。保留FreeRTOSportable目录下的Keil、MemMang、RVDS,其他的可以删除(其实Keil也可以删除)。




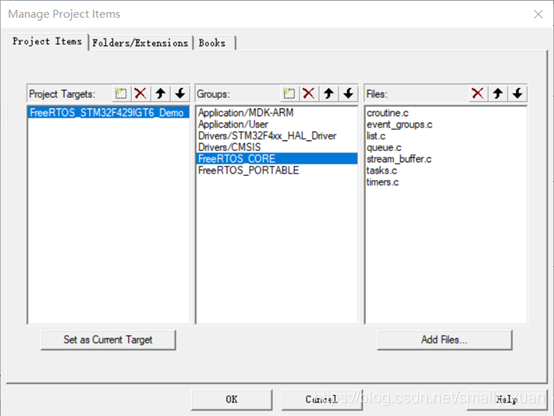
在Keil uVision5中创建分组FreeRTOS_CORE、FreeRTOS_PORTABLE。将FreeRTOS目录下的croutine.c、event_groups.c、list.c、queue.c、stream_buffer.c、tasks.c、timers.c全部添加到分组FreeRTOS_CORE。将FreeRTOSportableMemMangheap_4.c和FreeRTOSportableRVDSARM_CM4Fport.c添加到分组FreeRTOS_PORTABLE。

然后将FreeRTOS的相关头文件路径添加到项目中。

将官方Demo中的FreeRTOS复制到我们的工程目录FreeRTOSinclude中去。

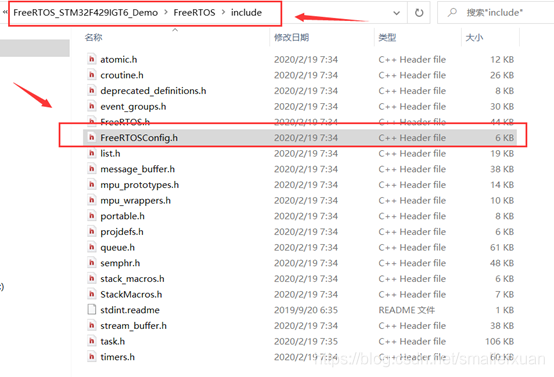
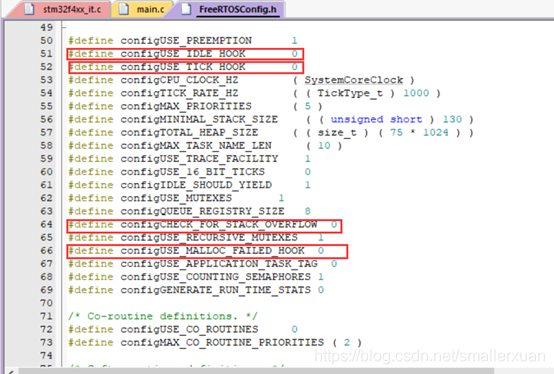
将FreeRTOSConfig.h中第45行左右的 #ifdef __ICCARM__ 修改为 #ifdef __CC_ARM以便和我们使用的编译器匹配。


将FreeRTOSConfig.h中目前没有实现的没有使用的钩子函数开启宏关闭(官方Demo中开启了这些宏):configUSE_IDLE_HOOK、configUSE_TICK_HOOK、configCHECK_FOR_STACK_OVERFLOW、configUSE_MALLOC_FAILED_HOOK。

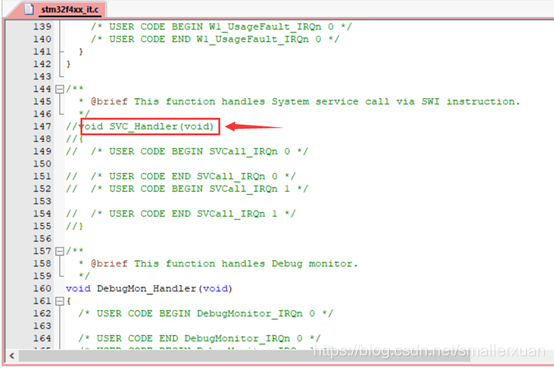
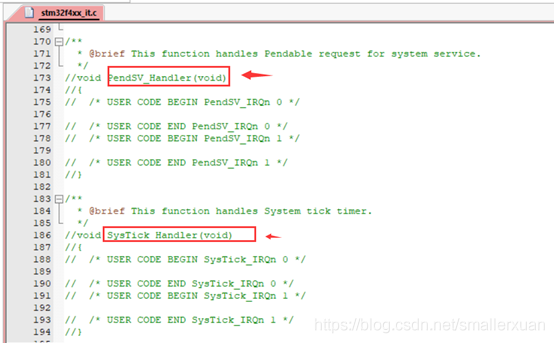
打开文件stm32f4xx_it.c,找到SVC_Handler、PendSV_Handler、SysTick_Handler的函数定义将其屏蔽,因为这三个函数和FreeRTOS内核息息相关,在FreeRTOS内核源码中有具体实现,屏蔽掉是为了祛除重定义。
这时候编译,会正常通过。
四、添加基础功能
经过以上步骤实际上已经基本完成了FreeRTOS V10.3.1在STM32F429IGT6的移植,但是为了方便测试,我们还将添加一些基础功能。
4.1串口DMA发送
添加USART1_Tx DMA传输N字节相关代码段:
#define USART1_TX_DMA_BUFFER_MAX_SIZE 1024
uint8_t Usart1_Tx_DMA_Buffer[USART1_TX_DMA_BUFFER_MAX_SIZE+1];
uint16_t Usart1_DMASend_NBytes(uint8_t* buffer, uint16_t size)
{
uint16_t size_t=0;
if(!size) return 0;
size_t = (size 》 USART1_TX_DMA_BUFFER_MAX_SIZE ? USART1_TX_DMA_BUFFER_MAX_SIZE : size);
while(0 != __HAL_DMA_GET_COUNTER(&hdma_usart1_tx)){;}
if(buffer!=NULL)
{
memcpy(&Usart1_Tx_DMA_Buffer[0], buffer,size_t);
}
HAL_UART_Transmit_DMA(&huart1, Usart1_Tx_DMA_Buffer, size_t);
return size;
}
创建几个简单的FreeRTOS任务:
#define START_TASK_PRIO 1
#define START_STK_SIZE 128
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
#define USART1_SEND_TASK_PRIO 2
#define USART1_SEND_STK_SIZE 256
TaskHandle_t USART1_SendTask_Handler;
void USART1_Send_task(void *pvParameters);
#define APP_TASK_PRIO 3
#define APP_STK_SIZE 256
TaskHandle_t APP_Task_Handler;
void APP_task(void *pvParameters);
#define SENSOR_TASK_PRIO 4
#define SENSOR_STK_SIZE 256
TaskHandle_t Sensor_Task_Handler;
void Sensor_task(void *pvParameters);
#define USART1_TX_Q_NUM 5
QueueHandle_t Queue_Usart1_tx;
#define MAX_FRAME_COMM_BUFFER_SIZE USART1_TX_DMA_BUFFER_MAX_SIZE
typedef struct
{
uint8_t* start_addr;
uint16_t len;
}Usart1_Tx_Buffer_Typedef;
int main(void)
{
BaseType_t TaskCreateStatus;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
TaskCreateStatus= xTaskCreate((TaskFunction_t )start_task,
(const char* )“start_task”,
(uint16_t )START_STK_SIZE,
(void* )NULL,
(UBaseType_t )START_TASK_PRIO,
(TaskHandle_t* )&StartTask_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ start_task create successrn”);
}
vTaskStartScheduler();
while (1)
{
}
}
void start_task(void *pvParameters)
{
BaseType_t TaskCreateStatus;
taskENTER_CRITICAL();
Queue_Usart1_tx=xQueueCreate(USART1_TX_Q_NUM,sizeof(Usart1_Tx_Buffer_Typedef));
TaskCreateStatus= xTaskCreate((TaskFunction_t )USART1_Send_task,
(const char* )“USART1_Send_task”,
(uint16_t )USART1_SEND_STK_SIZE,
(void* )NULL,
(UBaseType_t )USART1_SEND_TASK_PRIO,
(TaskHandle_t* )&USART1_SendTask_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
TaskCreateStatus= xTaskCreate((TaskFunction_t )APP_task,
(const char* )“APP_task”,
(uint16_t )APP_STK_SIZE,
(void* )NULL,
(UBaseType_t )APP_TASK_PRIO,
(TaskHandle_t* )&APP_Task_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
TaskCreateStatus= xTaskCreate((TaskFunction_t )Sensor_task,
(const char* )“Sensor_task”,
(uint16_t )SENSOR_STK_SIZE,
(void* )NULL,
(UBaseType_t )SENSOR_TASK_PRIO,
(TaskHandle_t* )&Sensor_Task_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
vTaskDelete(StartTask_Handler);
taskEXIT_CRITICAL();
}
void USART1_SendData(uint8_t *pData,uint16_t len)
{
Usart1_Tx_Buffer_Typedef Tx_Buff;
Tx_Buff.start_addr = pData;
Tx_Buff.len = len;
xQueueSendToBack(Queue_Usart1_tx,(void *)&Tx_Buff,portMAX_DELAY);
}
void USART1_Send_task(void *pvParameters)
{
Usart1_Tx_Buffer_Typedef Tx_Type;
BaseType_t res = pdTRUE;
while(1)
{
res = xQueueReceive(Queue_Usart1_tx,&Tx_Type,portMAX_DELAY);
if(res == pdTRUE) Usart1_DMASend_NBytes(Tx_Type.start_addr,Tx_Type.len);//通过DMA发送
vTaskDelay(10);
}
}
void APP_task(void *pvParameters)
{
uint8_t testOut[128];
uint32_t index=0;
while(1)
{
sprintf((char*)testOut,“APP_task %u rn”,index++);
USART1_SendData(testOut,strlen((const char*)testOut));
vTaskDelay(100);
}
}
void Sensor_task(void *pvParameters)
{
uint8_t testOut2[128];
uint32_t index=0;
while(1)
{
sprintf((char*)testOut2,“Sensor_task %u rn”,index++);
USART1_SendData(testOut2,strlen((const char*)testOut2));
vTaskDelay(100);
}
}
4.2下载验证
将工程进行编译、下载验证,符合预期。

STM32F429移植FreeRTOS
一、环境
Win10、Keil uVision5、STM32CubeMX、STM32F429IGT6
二、准备工作
2.1创建基于HAL库的STM32F429基础工程
创建新项目,MCU型号选择STM32F429IGTx,然后开始项目。
选择使用外部高速时钟,时钟源为外部晶振,然后配置系统时钟,根据晶振频率将系统时钟配置到180MHz。
配置USART1为异步收发串口模式,设定为115200波特率,8位数据位,1位停止位,无奇偶校验,配置USART1相关外设IO引脚,启用USART1 DMA收发传输,启用USART1中断和其DMA收发关联通道中断并设定优先级。
在项目管理子页面对项目相关配置项以及代码生成项进行相关配置。
建议对HAL时基源选择为SysTick以外的时钟源。
以上步骤完成后点击生成代码,代码生成完以后用Keil uVision5打开项目并进行编译,此时编译应该是能正常编译的。
经过以上步骤,我们创建了不含有FreeRTOS的基础工程(如果想使用CMSIS接口的也可以在配置时直接勾选使用FreeRTOS中间件)。
2.2获取FreeRTOS源码
FreeRTOS作为开源RTOS,允许开源商用,可以在其官方网站找到源码获取入口(官方网址为:www.freertos.org)。进入官网后,在首页点击下载FreeRTOS,进入下载页面点击下载。这里我获取的是FreeRTOS V10.3.1的源码。
三、FreeRTOS移植
在STM32CubeMX生成的项目目录中添加子目录FreeRTOS。将官方源码中Source目录中的所有内容全部复制到我们创建的FreeRTOS目录下。保留FreeRTOSportable目录下的Keil、MemMang、RVDS,其他的可以删除(其实Keil也可以删除)。
在Keil uVision5中创建分组FreeRTOS_CORE、FreeRTOS_PORTABLE。将FreeRTOS目录下的croutine.c、event_groups.c、list.c、queue.c、stream_buffer.c、tasks.c、timers.c全部添加到分组FreeRTOS_CORE。将FreeRTOSportableMemMangheap_4.c和FreeRTOSportableRVDSARM_CM4Fport.c添加到分组FreeRTOS_PORTABLE。
然后将FreeRTOS的相关头文件路径添加到项目中。
将官方Demo中的FreeRTOS复制到我们的工程目录FreeRTOSinclude中去。
将FreeRTOSConfig.h中第45行左右的 #ifdef __ICCARM__ 修改为 #ifdef __CC_ARM以便和我们使用的编译器匹配。
将FreeRTOSConfig.h中目前没有实现的没有使用的钩子函数开启宏关闭(官方Demo中开启了这些宏):configUSE_IDLE_HOOK、configUSE_TICK_HOOK、configCHECK_FOR_STACK_OVERFLOW、configUSE_MALLOC_FAILED_HOOK。
打开文件stm32f4xx_it.c,找到SVC_Handler、PendSV_Handler、SysTick_Handler的函数定义将其屏蔽,因为这三个函数和FreeRTOS内核息息相关,在FreeRTOS内核源码中有具体实现,屏蔽掉是为了祛除重定义。
这时候编译,会正常通过。
四、添加基础功能
经过以上步骤实际上已经基本完成了FreeRTOS V10.3.1在STM32F429IGT6的移植,但是为了方便测试,我们还将添加一些基础功能。
4.1串口DMA发送
添加USART1_Tx DMA传输N字节相关代码段:
#define USART1_TX_DMA_BUFFER_MAX_SIZE 1024
uint8_t Usart1_Tx_DMA_Buffer[USART1_TX_DMA_BUFFER_MAX_SIZE+1];
uint16_t Usart1_DMASend_NBytes(uint8_t* buffer, uint16_t size)
{
uint16_t size_t=0;
if(!size) return 0;
size_t = (size 》 USART1_TX_DMA_BUFFER_MAX_SIZE ? USART1_TX_DMA_BUFFER_MAX_SIZE : size);
while(0 != __HAL_DMA_GET_COUNTER(&hdma_usart1_tx)){;}
if(buffer!=NULL)
{
memcpy(&Usart1_Tx_DMA_Buffer[0], buffer,size_t);
}
HAL_UART_Transmit_DMA(&huart1, Usart1_Tx_DMA_Buffer, size_t);
return size;
}
创建几个简单的FreeRTOS任务:
#define START_TASK_PRIO 1
#define START_STK_SIZE 128
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
#define USART1_SEND_TASK_PRIO 2
#define USART1_SEND_STK_SIZE 256
TaskHandle_t USART1_SendTask_Handler;
void USART1_Send_task(void *pvParameters);
#define APP_TASK_PRIO 3
#define APP_STK_SIZE 256
TaskHandle_t APP_Task_Handler;
void APP_task(void *pvParameters);
#define SENSOR_TASK_PRIO 4
#define SENSOR_STK_SIZE 256
TaskHandle_t Sensor_Task_Handler;
void Sensor_task(void *pvParameters);
#define USART1_TX_Q_NUM 5
QueueHandle_t Queue_Usart1_tx;
#define MAX_FRAME_COMM_BUFFER_SIZE USART1_TX_DMA_BUFFER_MAX_SIZE
typedef struct
{
uint8_t* start_addr;
uint16_t len;
}Usart1_Tx_Buffer_Typedef;
int main(void)
{
BaseType_t TaskCreateStatus;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
TaskCreateStatus= xTaskCreate((TaskFunction_t )start_task,
(const char* )“start_task”,
(uint16_t )START_STK_SIZE,
(void* )NULL,
(UBaseType_t )START_TASK_PRIO,
(TaskHandle_t* )&StartTask_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ start_task create successrn”);
}
vTaskStartScheduler();
while (1)
{
}
}
void start_task(void *pvParameters)
{
BaseType_t TaskCreateStatus;
taskENTER_CRITICAL();
Queue_Usart1_tx=xQueueCreate(USART1_TX_Q_NUM,sizeof(Usart1_Tx_Buffer_Typedef));
TaskCreateStatus= xTaskCreate((TaskFunction_t )USART1_Send_task,
(const char* )“USART1_Send_task”,
(uint16_t )USART1_SEND_STK_SIZE,
(void* )NULL,
(UBaseType_t )USART1_SEND_TASK_PRIO,
(TaskHandle_t* )&USART1_SendTask_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
TaskCreateStatus= xTaskCreate((TaskFunction_t )APP_task,
(const char* )“APP_task”,
(uint16_t )APP_STK_SIZE,
(void* )NULL,
(UBaseType_t )APP_TASK_PRIO,
(TaskHandle_t* )&APP_Task_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
TaskCreateStatus= xTaskCreate((TaskFunction_t )Sensor_task,
(const char* )“Sensor_task”,
(uint16_t )SENSOR_STK_SIZE,
(void* )NULL,
(UBaseType_t )SENSOR_TASK_PRIO,
(TaskHandle_t* )&Sensor_Task_Handler);
if(pdPASS == TaskCreateStatus)
{
//printf(“ LED0Task create successrn”);
}
vTaskDelete(StartTask_Handler);
taskEXIT_CRITICAL();
}
void USART1_SendData(uint8_t *pData,uint16_t len)
{
Usart1_Tx_Buffer_Typedef Tx_Buff;
Tx_Buff.start_addr = pData;
Tx_Buff.len = len;
xQueueSendToBack(Queue_Usart1_tx,(void *)&Tx_Buff,portMAX_DELAY);
}
void USART1_Send_task(void *pvParameters)
{
Usart1_Tx_Buffer_Typedef Tx_Type;
BaseType_t res = pdTRUE;
while(1)
{
res = xQueueReceive(Queue_Usart1_tx,&Tx_Type,portMAX_DELAY);
if(res == pdTRUE) Usart1_DMASend_NBytes(Tx_Type.start_addr,Tx_Type.len);//通过DMA发送
vTaskDelay(10);
}
}
void APP_task(void *pvParameters)
{
uint8_t testOut[128];
uint32_t index=0;
while(1)
{
sprintf((char*)testOut,“APP_task %u rn”,index++);
USART1_SendData(testOut,strlen((const char*)testOut));
vTaskDelay(100);
}
}
void Sensor_task(void *pvParameters)
{
uint8_t testOut2[128];
uint32_t index=0;
while(1)
{
sprintf((char*)testOut2,“Sensor_task %u rn”,index++);
USART1_SendData(testOut2,strlen((const char*)testOut2));
vTaskDelay(100);
}
}
4.2下载验证
将工程进行编译、下载验证,符合预期。

 举报
举报































 举报
举报



