智能wifi小车项目说明:
使用两块esp8266建立通信,加入了mqtt协议,esp8266发送方通过按键发布信息(手柄作用)esp8266作为接收方,接收订阅主题所发来的信息并通过串口打印数据,stm32作为主控,控制两个车轮的前进后退,左转右转,并做好串口接收的执行功能
完整项目分为三个模块
1,esp8266发送方(用于控制小车) 类似遥控装置跳转链接
2,esp8266接收方(接收发送方的消息) 类似接收装置跳转链接
3.主控方(stm32c8t6用于直接驱动小车) 执行命令方
本项目为第《3》 模块,使用stm32f103c8 开发环境keil5
第《3》 模块说明:使用主控板+电机驱动芯片控制电机的前进后退,左转右转,电机驱动芯片:L293D
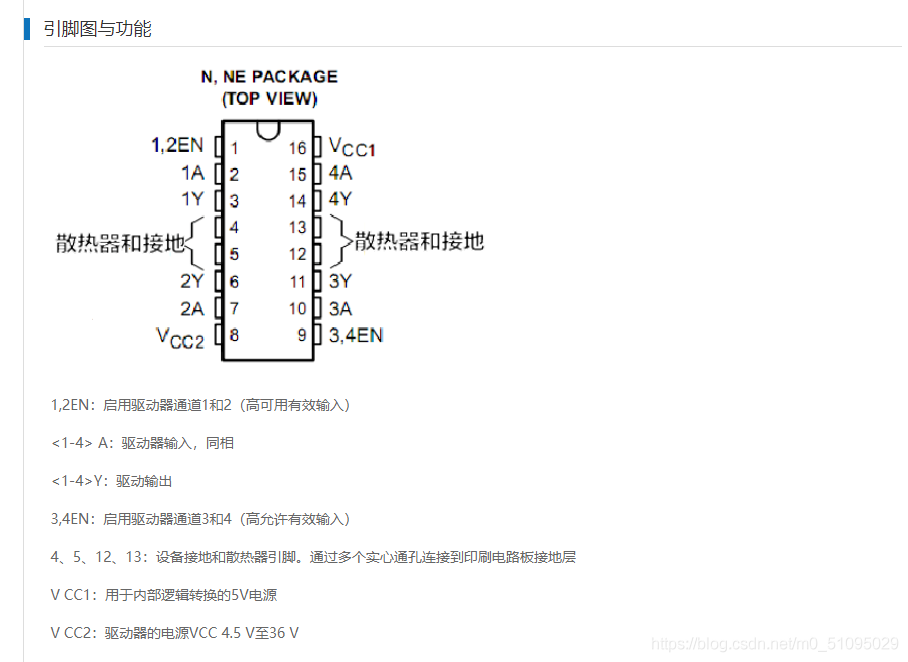 输出端接电机A和电机B,
3,6脚接 电机A 3+ 6-
11,14脚接电机B 11+ 14-
输入端接c8t6的:
PA6–7 前进左轮
PA7–10 前进右轮
PB6–2 后退左轮
PB7–15 后退右轮
经过实验,这里使电机运动,频率使用1khz,占空比小于60% ,大于%60电机转速过快(限速)
而使电机运动的最小占空比是在35%左右,这里设定周期值为1000,占空比的范围控制在350-600左右
理论上控制相同电机输出相同pwm波就可以了,但是我这个有问题……给同样占空比两个轮子不一致,硬件问题,没办法,调了好久,大概能走个直线,这种使用pid+huo霍尔编码器解决应该挺不错,有时间再搞,思路大概是这样,霍尔编码器可以检测两个电机的转速,当两个轮子转速不一致时候,要么提高转速慢的轮子,要么降低转速快的轮子,这一过程实现闭环控制。
为了方便调节小车状态,我增加了按键的功能,通过按键调节车状态
万事俱备,只差串口,串口这里我做了对应几种状态,状态1,2,3,4分别对应前进,后退,左右转
这里还添加了一个状态0,当接收到串口的数据为0时候,LED为点亮状态,我们可以通过主板的LED,看是否建立了连接。
主要功能函数应用如下:
#include "stm32f10x.h"#include "stdio.h"#include "bsp_init.h"/*智能wifi小车项目说明:esp8266之间通过mqtt协议建立连接,实现小车的远程控制(前进,后退,左右)完整项目分为三个模块 1,esp8266发送方(用于控制小车) 类似遥控装置 2,esp8266接收方(接收发送方的消息) 类似接收装置3.主控方(stm32c8t6用于直接驱动小车) 执行命令方本项目为第《3》模块本项目使用PA6,PA7,PB6,PB7四个引脚间接控制电机(通过控制电机驱动芯片控制电机)PA6,PA7控制电机前进 PA6控制左轮 PA7控制右轮PB6,PB7控制电机后退实现原理:通过控制相同周期不同占空比来调节车轮转速理论上(结合电机之间造成的原因可能会存在误差)前进时:PA6,PA7占空比相同后退时:PB6,PB7占空比相同左转时:PA6占空比为0(此时PA6会输出低电平)PA7(占空比设定值能转动轮胎即可)左转时:PA7占空比为0(此时PA7会输出低电平)PA6(占空比设定值能转动轮胎即可)
输出端接电机A和电机B,
3,6脚接 电机A 3+ 6-
11,14脚接电机B 11+ 14-
输入端接c8t6的:
PA6–7 前进左轮
PA7–10 前进右轮
PB6–2 后退左轮
PB7–15 后退右轮
经过实验,这里使电机运动,频率使用1khz,占空比小于60% ,大于%60电机转速过快(限速)
而使电机运动的最小占空比是在35%左右,这里设定周期值为1000,占空比的范围控制在350-600左右
理论上控制相同电机输出相同pwm波就可以了,但是我这个有问题……给同样占空比两个轮子不一致,硬件问题,没办法,调了好久,大概能走个直线,这种使用pid+huo霍尔编码器解决应该挺不错,有时间再搞,思路大概是这样,霍尔编码器可以检测两个电机的转速,当两个轮子转速不一致时候,要么提高转速慢的轮子,要么降低转速快的轮子,这一过程实现闭环控制。
为了方便调节小车状态,我增加了按键的功能,通过按键调节车状态
万事俱备,只差串口,串口这里我做了对应几种状态,状态1,2,3,4分别对应前进,后退,左右转
这里还添加了一个状态0,当接收到串口的数据为0时候,LED为点亮状态,我们可以通过主板的LED,看是否建立了连接。
主要功能函数应用如下:
#include "stm32f10x.h"#include "stdio.h"#include "bsp_init.h"/*智能wifi小车项目说明:esp8266之间通过mqtt协议建立连接,实现小车的远程控制(前进,后退,左右)完整项目分为三个模块 1,esp8266发送方(用于控制小车) 类似遥控装置 2,esp8266接收方(接收发送方的消息) 类似接收装置3.主控方(stm32c8t6用于直接驱动小车) 执行命令方本项目为第《3》模块本项目使用PA6,PA7,PB6,PB7四个引脚间接控制电机(通过控制电机驱动芯片控制电机)PA6,PA7控制电机前进 PA6控制左轮 PA7控制右轮PB6,PB7控制电机后退实现原理:通过控制相同周期不同占空比来调节车轮转速理论上(结合电机之间造成的原因可能会存在误差)前进时:PA6,PA7占空比相同后退时:PB6,PB7占空比相同左转时:PA6占空比为0(此时PA6会输出低电平)PA7(占空比设定值能转动轮胎即可)左转时:PA7占空比为0(此时PA7会输出低电平)PA6(占空比设定值能转动轮胎即可)
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_init.h"
/*
智能wifi小车项目说明:esp8266之间通过mqtt协议建立连接,实现小车的远程控制(前进,后退,左右)
完整项目分为三个模块
1,esp8266发送方(用于控制小车) 类似遥控装置
2,esp8266接收方(接收发送方的消息) 类似接收装置
3.主控方(stm32c8t6用于直接驱动小车) 执行命令方
本项目为第《3》模块
本项目使用PA6,PA7,PB6,PB7四个引脚间接控制电机(通过控制电机驱动芯片控制电机)
PA6,PA7控制电机前进 PA6控制左轮 PA7控制右轮
PB6,PB7控制电机后退
实现原理:通过控制相同周期不同占空比来调节车轮转速
理论上(结合电机之间造成的原因可能会存在误差)
前进时:PA6,PA7占空比相同
后退时:PB6,PB7占空比相同
左转时:PA6占空比为0(此时PA6会输出低电平)PA7(占空比设定值能转动轮胎即可)
左转时:PA7占空比为0(此时PA7会输出低电平)PA6(占空比设定值能转动轮胎即可)
*/
/*===================函数声明========================*/
void key_pro(void);
void car_state(void);
/*===================================================*/
/*=====================变量==========================*/
static int carflag;
/*===================================================*/
/*============================================主函数==============================================*/
int d;
int main(void)
{
SystemInit(); //配置系统时钟为 72M
Bsp_Init();
while(1)
{
TIM_SetCompare1(TIM3, PA6duty); // PA6 前进左轮
TIM_SetCompare2(TIM3, PA7duty); // PA7 前进右轮
TIM_SetCompare1(TIM4, PB6duty); // PB6 后退左轮
TIM_SetCompare2(TIM4, PB7duty); // PB7 后退右轮
//for(d=1000;d>0;d--)
// printf("1:%dt 2:%dt 3:%dt 4:%dt",PA6duty,PA7duty,PB6duty,PB7duty);
key_pro();
car_state();
}
}
/*===================================================================================================*/
/*=========================================按键扫描===================================================*/
/*按键扫描*/
void key_pro(void)
{
//int count;//按键计数
if( Key_Scan(GPIOA,GPIO_Pin_0) == KEY_ON ) //判断KEY1是否按下
{
if(++carflag==5)carflag=0;
}
}
/*====================================================================================================*/
/*===========================================车状态=====================================================*/
void car_state(void)
{
if(carflag==0) //停止状态
{
//所有占空比为0
PA6duty=0;PA7duty=0;
PB6duty=0;PB7duty=0;
}
if(carflag==1)//前进状态
{
// 前进状态: PA6(左轮)PA6duty=360 PA7(右轮) PA7duty=420~480
PA6duty=420;PA7duty=400;
PB6duty=0;PB7duty=0;
}
if(carflag==2)//后退状态
{
// 后退状态: PB6(左轮)PB6duty=740 PB7(右轮) PB7duty=400
PA6duty=0;PA7duty=0;
PB6duty=750;PB7duty=350;
}
if(carflag==3)//左转状态
{
// 前进左转: PA6(左轮)PA6duty=0 PA7(右轮) PA7duty=360
PA6duty=0;PA7duty=360;
PB6duty=0;PB7duty=0;
}
if(carflag==4)//右转状态
{
//前进右转: PA6(左轮)PA6duty=360 PA7(右轮) PA7duty=0
PA6duty=400;PA7duty=0;
PB6duty=0;PB7duty=0;
}
}
/*=====================================串口1中断服务函数===============================================*/
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
res=USART_ReceiveData(USART1);
USART_SendData(USART1,res);
if(res == '0') {LED_ON; carflag=0; }
if(res == '1') {LED_ON; carflag=1; }
if(res == '2') {LED_ON; carflag=2;}
if(res == '3') {LED_ON; carflag=3;}
if(res == '4') {LED_ON; carflag=4;}
res = 0;
}
}
/*===========================================================================================================*/
智能wifi小车项目说明:
使用两块esp8266建立通信,加入了mqtt协议,esp8266发送方通过按键发布信息(手柄作用)esp8266作为接收方,接收订阅主题所发来的信息并通过串口打印数据,stm32作为主控,控制两个车轮的前进后退,左转右转,并做好串口接收的执行功能
完整项目分为三个模块
1,esp8266发送方(用于控制小车) 类似遥控装置跳转链接
2,esp8266接收方(接收发送方的消息) 类似接收装置跳转链接
3.主控方(stm32c8t6用于直接驱动小车) 执行命令方
本项目为第《3》 模块,使用stm32f103c8 开发环境keil5
第《3》 模块说明:使用主控板+电机驱动芯片控制电机的前进后退,左转右转,电机驱动芯片:L293D
输出端接电机A和电机B,
3,6脚接 电机A 3+ 6-
11,14脚接电机B 11+ 14-
输入端接c8t6的:
PA6–7 前进左轮
PA7–10 前进右轮
PB6–2 后退左轮
PB7–15 后退右轮
经过实验,这里使电机运动,频率使用1khz,占空比小于60% ,大于%60电机转速过快(限速)
而使电机运动的最小占空比是在35%左右,这里设定周期值为1000,占空比的范围控制在350-600左右
理论上控制相同电机输出相同pwm波就可以了,但是我这个有问题……给同样占空比两个轮子不一致,硬件问题,没办法,调了好久,大概能走个直线,这种使用pid+huo霍尔编码器解决应该挺不错,有时间再搞,思路大概是这样,霍尔编码器可以检测两个电机的转速,当两个轮子转速不一致时候,要么提高转速慢的轮子,要么降低转速快的轮子,这一过程实现闭环控制。
为了方便调节小车状态,我增加了按键的功能,通过按键调节车状态
万事俱备,只差串口,串口这里我做了对应几种状态,状态1,2,3,4分别对应前进,后退,左右转
这里还添加了一个状态0,当接收到串口的数据为0时候,LED为点亮状态,我们可以通过主板的LED,看是否建立了连接。
主要功能函数应用如下:
#include "stm32f10x.h"#include "stdio.h"#include "bsp_init.h"/*智能wifi小车项目说明:esp8266之间通过mqtt协议建立连接,实现小车的远程控制(前进,后退,左右)完整项目分为三个模块 1,esp8266发送方(用于控制小车) 类似遥控装置 2,esp8266接收方(接收发送方的消息) 类似接收装置3.主控方(stm32c8t6用于直接驱动小车) 执行命令方本项目为第《3》模块本项目使用PA6,PA7,PB6,PB7四个引脚间接控制电机(通过控制电机驱动芯片控制电机)PA6,PA7控制电机前进 PA6控制左轮 PA7控制右轮PB6,PB7控制电机后退实现原理:通过控制相同周期不同占空比来调节车轮转速理论上(结合电机之间造成的原因可能会存在误差)前进时:PA6,PA7占空比相同后退时:PB6,PB7占空比相同左转时:PA6占空比为0(此时PA6会输出低电平)PA7(占空比设定值能转动轮胎即可)左转时:PA7占空比为0(此时PA7会输出低电平)PA6(占空比设定值能转动轮胎即可)
#include "stm32f10x.h"
#include "stdio.h"
#include "bsp_init.h"
/*
智能wifi小车项目说明:esp8266之间通过mqtt协议建立连接,实现小车的远程控制(前进,后退,左右)
完整项目分为三个模块
1,esp8266发送方(用于控制小车) 类似遥控装置
2,esp8266接收方(接收发送方的消息) 类似接收装置
3.主控方(stm32c8t6用于直接驱动小车) 执行命令方
本项目为第《3》模块
本项目使用PA6,PA7,PB6,PB7四个引脚间接控制电机(通过控制电机驱动芯片控制电机)
PA6,PA7控制电机前进 PA6控制左轮 PA7控制右轮
PB6,PB7控制电机后退
实现原理:通过控制相同周期不同占空比来调节车轮转速
理论上(结合电机之间造成的原因可能会存在误差)
前进时:PA6,PA7占空比相同
后退时:PB6,PB7占空比相同
左转时:PA6占空比为0(此时PA6会输出低电平)PA7(占空比设定值能转动轮胎即可)
左转时:PA7占空比为0(此时PA7会输出低电平)PA6(占空比设定值能转动轮胎即可)
*/
/*===================函数声明========================*/
void key_pro(void);
void car_state(void);
/*===================================================*/
/*=====================变量==========================*/
static int carflag;
/*===================================================*/
/*============================================主函数==============================================*/
int d;
int main(void)
{
SystemInit(); //配置系统时钟为 72M
Bsp_Init();
while(1)
{
TIM_SetCompare1(TIM3, PA6duty); // PA6 前进左轮
TIM_SetCompare2(TIM3, PA7duty); // PA7 前进右轮
TIM_SetCompare1(TIM4, PB6duty); // PB6 后退左轮
TIM_SetCompare2(TIM4, PB7duty); // PB7 后退右轮
//for(d=1000;d>0;d--)
// printf("1:%dt 2:%dt 3:%dt 4:%dt",PA6duty,PA7duty,PB6duty,PB7duty);
key_pro();
car_state();
}
}
/*===================================================================================================*/
/*=========================================按键扫描===================================================*/
/*按键扫描*/
void key_pro(void)
{
//int count;//按键计数
if( Key_Scan(GPIOA,GPIO_Pin_0) == KEY_ON ) //判断KEY1是否按下
{
if(++carflag==5)carflag=0;
}
}
/*====================================================================================================*/
/*===========================================车状态=====================================================*/
void car_state(void)
{
if(carflag==0) //停止状态
{
//所有占空比为0
PA6duty=0;PA7duty=0;
PB6duty=0;PB7duty=0;
}
if(carflag==1)//前进状态
{
// 前进状态: PA6(左轮)PA6duty=360 PA7(右轮) PA7duty=420~480
PA6duty=420;PA7duty=400;
PB6duty=0;PB7duty=0;
}
if(carflag==2)//后退状态
{
// 后退状态: PB6(左轮)PB6duty=740 PB7(右轮) PB7duty=400
PA6duty=0;PA7duty=0;
PB6duty=750;PB7duty=350;
}
if(carflag==3)//左转状态
{
// 前进左转: PA6(左轮)PA6duty=0 PA7(右轮) PA7duty=360
PA6duty=0;PA7duty=360;
PB6duty=0;PB7duty=0;
}
if(carflag==4)//右转状态
{
//前进右转: PA6(左轮)PA6duty=360 PA7(右轮) PA7duty=0
PA6duty=400;PA7duty=0;
PB6duty=0;PB7duty=0;
}
}
/*=====================================串口1中断服务函数===============================================*/
void USART1_IRQHandler(void)
{
u8 res;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
res=USART_ReceiveData(USART1);
USART_SendData(USART1,res);
if(res == '0') {LED_ON; carflag=0; }
if(res == '1') {LED_ON; carflag=1; }
if(res == '2') {LED_ON; carflag=2;}
if(res == '3') {LED_ON; carflag=3;}
if(res == '4') {LED_ON; carflag=4;}
res = 0;
}
}
/*===========================================================================================================*/

 举报
举报




 举报
举报



