

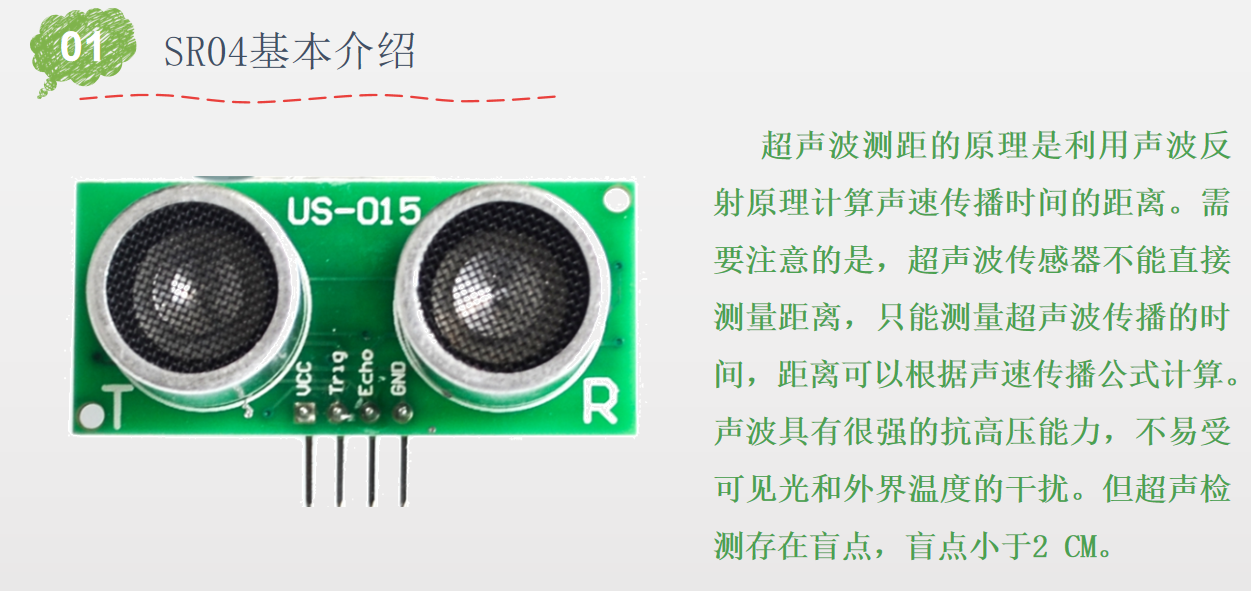
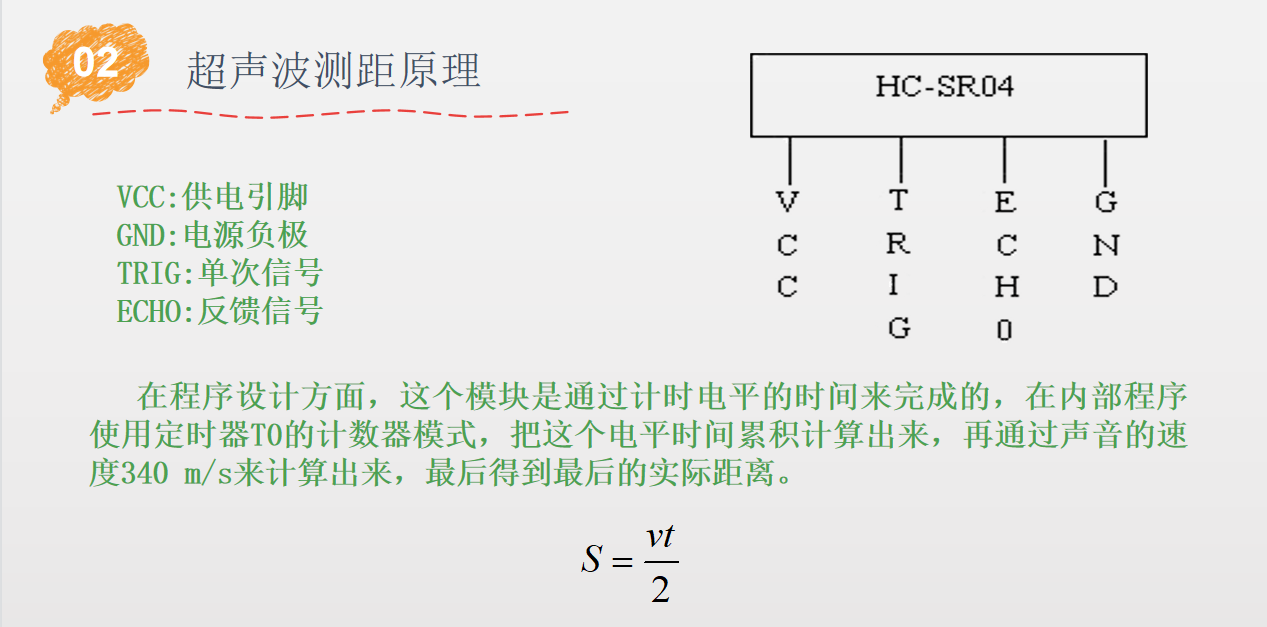
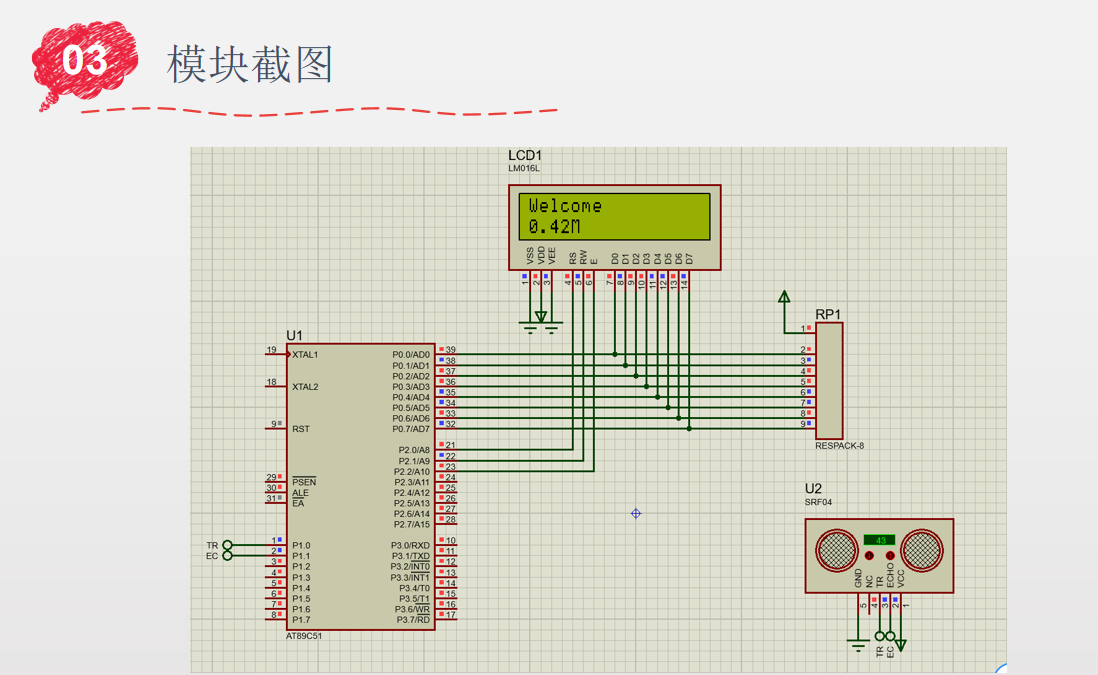
 Proteus教程:超声波测距与显示
Proteus教程:超声波测距与显示 视频链接:https://www.bilibili.com/video/BV1ik4y1677Q
#include< reg51.h >
#include < intrins.h >
#define uchar unsigned char
#define uint unsigned int
#define LCD1602_DATAPINS P0
sbit LCD1602_E=P2^2;
sbit LCD1602_RW=P2^1;
sbit LCD1602_RS=P2^0;
sbit Trig = P1^0;
sbit Echo = P1^1;
unsigned long S=0;
bit flag =0;
unsigned int DIstance,time;
/*******************************************************************************
* 函 数 名 : Lcd1602_Delay1ms
* 函数功能 : 延时函数,延时1ms
* 输 入 : c
* 输 出 : 无
* 说 名 : 该函数是在12MHZ晶振下,12分频单片机的延时。
*******************************************************************************/
void Lcd1602_Delay1ms(uint c) //误差 0us
{
uchar a,b;
for (; c >0; c--)
{
for (b=199;b >0;b--)
{
for(a=1;a >0;a--);
}
}
}
/*******************************************************************************
* 函 数 名 : LcdWriteCom
* 函数功能 : 向LCD写入一个字节的命令
* 输 入 : com
* 输 出 : 无
*******************************************************************************/
void LcdWriteCom(uchar com) //写入命令
{
LCD1602_E = 0; //使能
LCD1602_RS = 0; //选择发送命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdWriteData
* 函数功能 : 向LCD写入一个字节的数据
* 输 入 : dat
* 输 出 : 无
*******************************************************************************/
void LcdWriteData(uchar dat) //写入数据
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //选择输入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //写入数据
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdInit()
* 函数功能 : 初始化LCD屏
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void LcdInit() //LCD初始化子程序
{
LcdWriteCom(0x38); //开显示
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
}
//按指定位置显示一个字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //当要显示第二行时地址码+0x40;
X |= 0x80; // 算出指令码
LcdWriteCom(X); //这里不检测忙信号,发送地址码
LcdWriteData(DData);
}
//按指定位置显示一串字符
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData)
{
unsigned char ListLength;
ListLength = 0;
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
while (DData[ListLength] >=0x20) //若到达字串尾则退出
{
if (X <= 0xF) //X坐标应小于0xF
{
DisplayOneChar(X, Y, DData[ListLength]); //显示单个字符
ListLength++;
X++;
}
}
}
void StartModule() //启动模块
{
Trig=1; //启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
void Conut(void)
{
StartModule();
while(!Echo); //当RX为零时等待
TR0=1; //开启计数
while(Echo); //当RX为1计数并等待
TR0=0; //关闭计数
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
DIstance = S;
if((S >=700)||flag==1) //超出测量范围显示“-”
{
flag=0;
DisplayOneChar(0, 1, '0');
DisplayOneChar(1, 1, '.'); //显示点
DisplayOneChar(2, 1, '0');
DisplayOneChar(3, 1, '0');
DisplayOneChar(4, 1, 'M'); //显示M
}
else
{
DisplayOneChar(0, 1, (char)(S/100+'0'));
DisplayOneChar(1, 1, '.'); //显示点
DisplayOneChar(2, 1, (char)(S/10%10+'0'));
DisplayOneChar(3, 1, (char)(S%10+'0'));
DisplayOneChar(4, 1, 'M'); //显示M
}
}
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
void Sr04_Init()
{
TMOD=0x01; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
ET0=1; //允许T0中断
EA=1; //开启总中断
}
void main()
{
Sr04_Init();
LcdInit();
DisplayListChar(0,0,"Welcome");
while(1)
{
Conut();
}
}
审核编辑:汤梓红
全部0条评论

快来发表一下你的评论吧 !

