



李玉兰
分享资料个
大家好!这是我的下一个项目,智能手机控制的 Arduino 4WD 机器人汽车或蓝牙 Arduino 机器人。它可以前后左右移动,改变速度,打开/关闭前后灯,也可以喇叭。
这是一个非常简单的设计机器人,您可以轻松构建它。
所需零件:
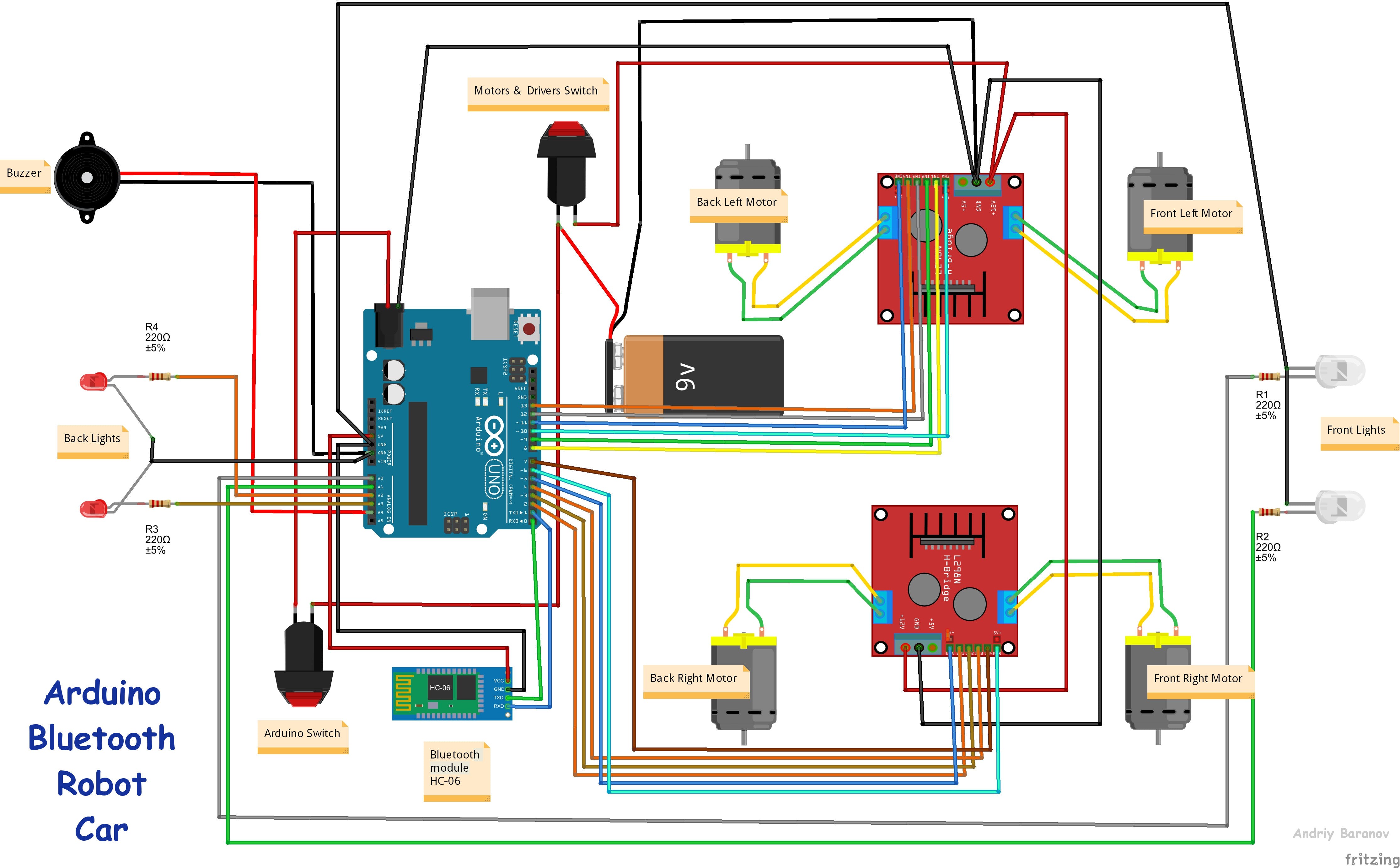
#define light_FR 14 //LED Front Right pin A0 for Arduino Uno#define light_FL 15 //LED Front Left pin A1 for Arduino Uno #define light_BR 16 //LED Back Right pin A2 for Arduino Uno #define light_BL 17 //LED Back Left pin A3 for Arduino Uno #define horn_Buzz 18 //Horn Buzzer pin A4 for Arduino Uno#define ENA_m1 5 // Enable/speed motor Front Right #define ENB_m1 6 // Enable/speed motor Back Right #define ENA_m2 10 // Enable/speed motor Front Left #define ENB_m2 11 // Enable/speed motor Back Left#define IN_11 2 // L298N #1 in 1 motor Front Right #define IN_12 3 // L298N #1 in 2 motor Front Right #define IN_13 4 // L298N #1 in 3 motor Back Right #define IN_14 7 // L298N #1 in 4 motor Back Right#define IN_21 8 // L298N #2 in 1 motor Front Left #define IN_22 9 // L298N #2 in 2 motor Front Left #define IN_23 12 // L298N #2 in 3 motor Back Left #define IN_24 13 // L298N #2 in 4 motor Back Leftint command; //Int to store app command state. int speedCar = 100; // 50 - 255. int speed_Coeff = 4; boolean lightFront = false; boolean lightBack = false; boolean horn = false;void setup() { pinMode(light_FR, OUTPUT); pinMode(light_FL, OUTPUT); pinMode(light_BR, OUTPUT); pinMode(light_BL, OUTPUT); pinMode(horn_Buzz, OUTPUT); pinMode(ENA_m1, OUTPUT); pinMode(ENB_m1, OUTPUT); pinMode(ENA_m2, OUTPUT); pinMode(ENB_m2, OUTPUT); pinMode(IN_11, OUTPUT); pinMode(IN_12, OUTPUT); pinMode(IN_13, OUTPUT); pinMode(IN_14, OUTPUT); pinMode(IN_21, OUTPUT); pinMode(IN_22, OUTPUT); pinMode(IN_23, OUTPUT); pinMode(IN_24, OUTPUT);Serial.begin(9600); } void goAhead(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar);}void goBack(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goRight(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar);}void goLeft(){digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goAheadRight(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar/speed_Coeff);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar/speed_Coeff);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar); }void goAheadLeft(){ digitalWrite(IN_11, HIGH); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, HIGH); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, HIGH); analogWrite(ENA_m2, speedCar/speed_Coeff);digitalWrite(IN_23, HIGH); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar/speed_Coeff); }void goBackRight(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar/speed_Coeff);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar/speed_Coeff);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar);}void goBackLeft(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, HIGH); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, HIGH); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, HIGH); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar/speed_Coeff);digitalWrite(IN_23, LOW); digitalWrite(IN_24, HIGH); analogWrite(ENB_m2, speedCar/speed_Coeff);}void stopRobot(){ digitalWrite(IN_11, LOW); digitalWrite(IN_12, LOW); analogWrite(ENA_m1, speedCar);digitalWrite(IN_13, LOW); digitalWrite(IN_14, LOW); analogWrite(ENB_m1, speedCar);digitalWrite(IN_21, LOW); digitalWrite(IN_22, LOW); analogWrite(ENA_m2, speedCar);digitalWrite(IN_23, LOW); digitalWrite(IN_24, LOW); analogWrite(ENB_m2, speedCar); } void loop(){ if (Serial.available() > 0) { command = Serial.read(); stopRobot(); //Initialize with motors stopped.if (lightFront) {digitalWrite(light_FR, HIGH); digitalWrite(light_FL, HIGH);} if (!lightFront) {digitalWrite(light_FR, LOW); digitalWrite(light_FL, LOW);} if (lightBack) {digitalWrite(light_BR, HIGH); digitalWrite(light_BL, HIGH);} if (!lightBack) {digitalWrite(light_BR, LOW); digitalWrite(light_BL, LOW);} if (horn) {digitalWrite(horn_Buzz, HIGH);} if (!horn) {digitalWrite(horn_Buzz, LOW);}switch (command) { case 'F':goAhead();break; case 'B':goBack();break; case 'L':goLeft();break; case 'R':goRight();break; case 'I':goAheadRight();break; case 'G':goAheadLeft();break; case 'J':goBackRight();break; case 'H':goBackLeft();break; case '0':speedCar = 100;break; case '1':speedCar = 115;break; case '2':speedCar = 130;break; case '3':speedCar = 145;break; case '4':speedCar = 160;break; case '5':speedCar = 175;break; case '6':speedCar = 190;break; case '7':speedCar = 205;break; case '8':speedCar = 220;break; case '9':speedCar = 235;break; case 'q':speedCar = 255;break; case 'W':lightFront = true;break; case 'w':lightFront = false;break; case 'U':lightBack = true;break; case 'u':lightBack = false;break; case 'V':horn = true;break; case 'v':horn = false;break;} } }
在上传代码之前,您必须断开蓝牙模块与 Arduino Uno 板(引脚 0、1)的连接。
要将您的智能手机连接到 Arduino 蓝牙模块 HC-06,我们必须输入 PIN CODE 1234 或 0000。
一旦您正确完成所有步骤,机器人就可以开始使用了!
谢谢你们!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉



全部0条评论

快来发表一下你的评论吧 !
